

BIMデータと連携し自身の位置を認識、施工自動化目指す
準大手ゼネコンの安藤ハザマとロボット開発を手掛けるイクシス(川崎市)はこのほど、自律走行ロボットを共同開発したと発表した。
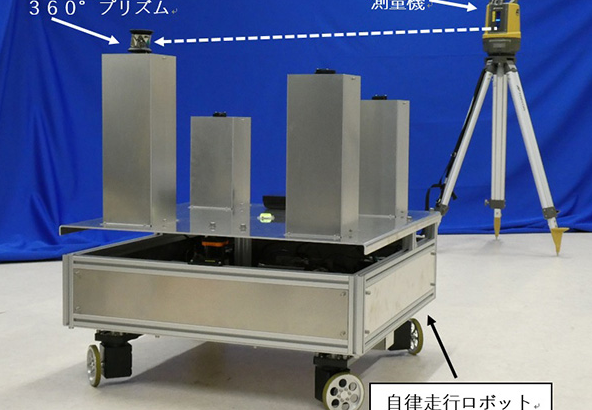
建物の構造や設備を3次元モデルで再現する「ビルディング・インフォメーション・モデリング(BIM)」のデータと連携。併せて、ロボットに搭載したレーザーレンジスキャナーや、現場に配置しているプリズム自動追尾型測量機などを使って周辺の状況を確認し、自己の位置を自動認識できる。情報システムとのデータやり取りは無線LANを活用し、タブレット端末やパソコン画面から操作が可能。
両社は「建築現場における材料の取り付け作業やそのアシスト、資機材の運搬や検査・点検など、さまざまな作業の自動化装置にロボットの(自己位置認識などの)技術を搭載することで作業を省力化し、生産性の向上につながる」と期待。ロボットに投入している技術の高度化を図り、早期に現場へ展開していきたい考え。
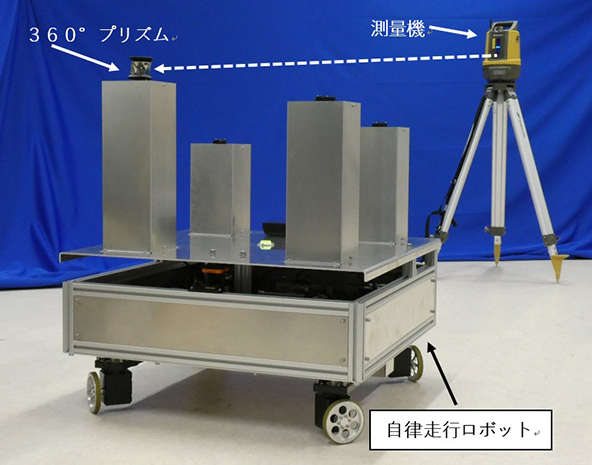
共同開発したロボット(安藤ハザマプレスリリースより引用)※クリックで拡大
(藤原秀行)






