


FaroStarとACSL、大阪万博での公開に向け安全性確保図る
次世代モビリティの自動管制を手掛けるFaroStar(ファーロスター)は2月10日、ドローン専業メーカーACSLと連携し、2月2日に大阪市、2月3日に広島県福山市でそれぞれ「非管制区域を飛行する無人航空機と回転翼航空機の安全性を高める衝突防止自動管制技術の実証試験」を実施、いずれも成功したと発表した。
政府や2025年の大阪・関西万博の会場で、長い滑走路を使わず垂直離発着が可能な「空飛ぶクルマ」の輸送サービスを公開、技術力を内外にアピールすることを目指している。しかし、万博会場上空や万博会場周辺空域の安全確保(衝突回避)が課題となっている。
今回の実証試験は安全確保(衝突回避)にかかる課題解決に向けた自動管制の実効性を検証するため、FaroStarが開発した衝突防止自動管制技術を活用。離島地域における空飛ぶクルマの活用をイメージし、新たな交通手段としての具体的な利用方法を住民が体験することで、社会的受容性の醸成を図ることを目的としている。
衝突防止自動管制技術は、航空機やドローンの飛行情報を取得し、そのデータを基に飛行体同士が衝突する可能性を検知すると、空飛ぶクルマを模擬したドローンに回避可能なWP(ウェイポイント)を指定して自動回避させ、衝突を避けられたと判定すれば次のWPに誘導するアルゴリズム。
また、実証試験に使用したACSL製の国産産業用ドローンは、物流、インフラ点検、災害など様々な分野で既に採用済み。特に、全国的にも事例の少ない補助者無し目視外飛行(レベル3)で多くの実績を積んでいる。国産ドローン「ACSL-PF2」にFarostarの衝突防止自動管制技術を搭載することで、ドローン飛行の安全性を高めることが可能となった。
※以下、プレスリリースより引用(一部、編集部で修正)
概要
■実施日:2022年2月2日(水)~3日(木)
■場所:大阪府大阪市、広島県福山市
■内容:本実証では仮想ドローンとACSL-PF2実機での回避試験を実施
・「空飛ぶクルマ」を模擬したドローンが出発地を離陸し、計画飛行により指定の場所へ飛行する
・計画飛行中にFaroStarの衝突防止自動管制システムからの指示により仮想ドローンの回避行動を行う
・回避後は元のルートに戻り、指定の場所に着陸する
結果
■2カ所の実証試験で、計画飛行中のドローンが衝突防止自動管制システムからの指示により仮想ドローンの回避を行うことができた
■回避後は元の計画飛行に戻り、指定の場所に着陸、安全に飛行することができた

出発地点からドローンが離陸する様子
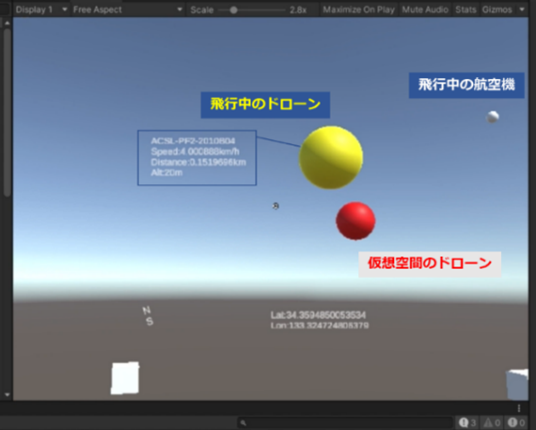
仮想空間にある障害物をドローンが避けていることを確認

FaroStarVisionアプリで試験状況をリアルタイム配信

回避後、元のルートに戻り着陸する様子

実証実験に用いたドローン(ACSL-PF2)
(画像はFaroStar提供)
(ロジビズ・オンライン編集部)






