梁の段差や道路冠水の水位を測定、実用化目指す
情報システム関連のコンサルティングなどを手掛けるアヴァントは12月7日、関東経済産業局、関東地方整備局、中小企業基盤整備機構関東本部が連携する「コンストラクションオープンイノベーションマッチング」で、同社が提案した「ドローン画像解析による車両通行可否判断システム」の実証実験を実施したと発表した。システムの有効性と実用の可能性を検証した。
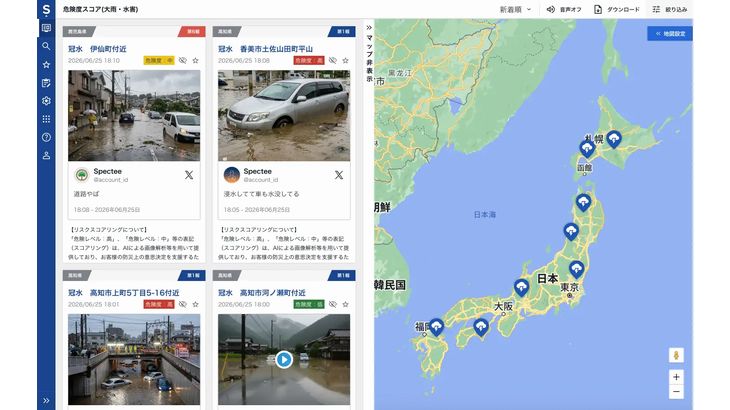
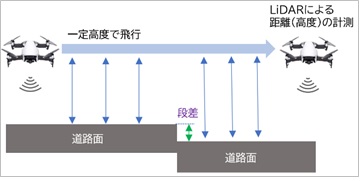
同システムはドローンに搭載したLiDAR (レーザーレーダー)を使って橋梁の段差や道路冠水の水位を測定。AIが画像を解析し、災害時に車両が通行できるかどうかを自動的に判断する。
実験では実用までに多くの課題を解決する必要があることが浮き彫りとなったが、アヴァントはドローンの利用法や測定の安定性、画像解析の精度を追求することで、災害時でも安全に車両通行の可否を判断するシステムの活躍の場が広がる可能性を確認できたと主張している。


実験の様子(アヴァント提供)
(ロジビズ・オンライン編集部)