



「ソフトウエアUI」にこだわるべし
リンクス AW事業部
小山早俊 プロダクトマネージャー
物流業界や製造業では深刻な人手不足に加え、新型コロナウイルスの感染拡大で非密集・非接触の重要性が増していることもあり、自動化技術導入の機運がますます高まっています。
その中でも、倉庫や工場の床に誘導のための磁気テープを貼ったりする必要がなく、人に代わって商品や部品を自動で運ぶ「ガイドレスAGV(無人搬送ロボット)」や「ガイドレスAGF(無人搬送フォークリフト)」の注目度が一層アップしています。
ロジビズ・オンラインは先進的な技術を製造業や物流業などにいち早く紹介することを社是としている技術商社リンクスの小山早俊氏に、ガイドレスAGV・AGFの現状や導入する上での重要な視点を全8回にわたって解説していただいております。4回目は「ソフトウエアUI(ユーザーインターフェース)」にこだわるべしとの提言です。さて、具体的にどんな内容なのでしょうか、乞うご期待!
技術知識が多くないユーザーでも使いこなせるように
前回はガイドレスAGVに求められるフリートコントロール(群制御)についてご紹介した。
—————————————————–
ガイドレスAGVの選定ポイント
1.自己位置推定能力
2.群制御(フリートコントロール)
3.操作性
—————————————————–
今回は3番目の操作性、特にソフトウエアUI(ユーザーインターフェース)について述べてみたい。

AGVの世界ではこれまで車両の運行全体に関する設定をエンドユーザー側で細かくいじることは考えられていなかった。もともと磁気テープ式が主流だったためそれほど複雑な制御ができなかったということもあり、QRコードやSLAM誘導方式のAGVが出てきた当初もあまりUIが発達していなかった。
汎用的な部分はユーザー側でも操作できるが、少しでも複雑なことをしようとすると車両メーカーがカスタム開発で行う前提だった。このことが一因となって、これまでガイドレスAGVは比較的単純なルートや局所的な運用が多く、大規模に導入されるケースは少なかったのではないかと筆者は考えている。
昨今、ガイドレスAGV市場の活性化に伴い、優れたUIを持つガイドレスAGVへのニーズが高まっている。FA(工場自動化)領域のユーザーは、技術的な素地があるため、現場で思考や工夫を凝らして使用することができた。
ところが、物流・食品・小売といった業界でもガイドレスAGV導入が進むと、技術知識をそれほど多く持たないユーザーが増えていく。そのようなユーザーにとっても設定・操作を完結できるソフトウエアUIが求められるようになってきたのだ。
今回、選定ポイントの1つとしてソフトウエアUIを挙げたのは、ガイドレスAGVの普及は技術的な性能と同じくらいにソフトウエアUIの発展が重要になってくるだろうとみているからだ。最近、エンドユーザー向けのユーザビリティを意識したAGV向けの汎用パッケージソフトが出てきており、今後はそういうものが一般的になっていくのではないだろうか。
ともあれ、ガイドレスAGVのソフトウエアUIについて、使用の流れに沿って述べてみる。
●マップ作成
まず、ガイドレスAGVを自律走行させるためにはマップ情報が必要になる。
マップの作成方法はフロアのCAD(コンピューターによる設計)データを利用する方法と、スキャナーやカメラで環境情報を取得してマップにする方法の2通りがある。実際の環境と一致するCADデータがない場合も多いので、ほとんどのツールは後者の機能を備えている。
ゲームパッドやタブレットからのリモコン操作で車両を走行させ、ルート周辺をくまなくスキャンして壁や柱などの構造物だけをマップ情報として抽出する。これらの作業は操作としては難しくないが、このマップの出来具合が後々AGVの走行に影響するので注意が不可欠だ。導入後にAGVの運用が変わると走行エリアも変わる可能性があるので、マップの追加しやすさといった柔軟性の有無も考慮する必要がある。
●ルート作成
磁気テープ式AGVではテープに経路や進路変更などの情報を持たせることができたが、ガイドレスAGVでは全てソフト上で設定を行う。このため、走行ルートを容易に変更可能な点がガイドレスAGVの長所だ。フロア全体のレイアウト図があれば、PC上でその作業のほとんどを進められるため、AGVの運行を止める必要がない。
ソフトの扱いやすさは実際に触ってみないと分からないが、前述の通り優れたUIを持つソフトウエアも登場し始めている。例えば、筆者の所属するリンクスが取り扱っているNavitec Systems社のソフトの場合、20メートル四方くらいの広さで単純なルートであれば、10~30分程度でマップ作成からルート設定までが完了する。磁気テープを貼り直し走行テストする手間を考えると、大幅な工数削減になる。段替えが多い用途であればなおさらだ。
このようにUIの出来はガイドレスAGVを使用する上で非常に重要なポイントだ。

マップ作成の様子(写真はいずれもリンクス提供)
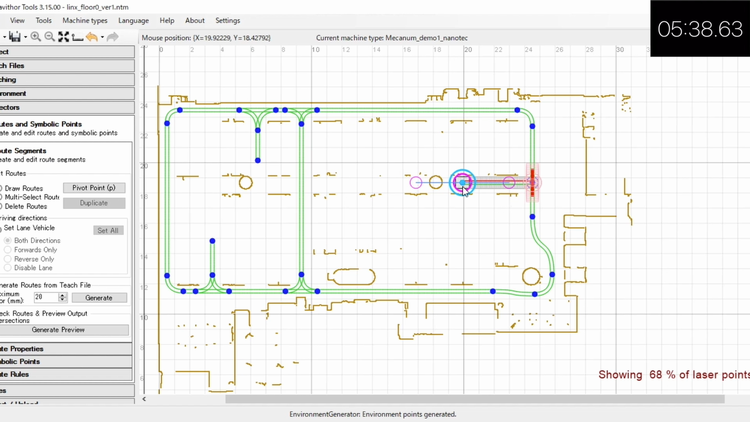
ルート設定のイメージ
●フリートコントロール設定と監視
さて、ここからがガイドレスAGV導入の本丸ともいえる部分だ。これまで磁気テープ方式では難しかったことが、ガイドレスAGVであればこなせるようになる。そう期待して導入するユーザーは多いが、複雑な制御をしようとすると、それに対応できるUIを持つシステムはそれほど多くない。
フリートコントロールにおけるユーザーの要求仕様は各アプリケーションで千差万別のため、車両メーカーやシステムインテグレーターはカスタム開発を前提としている。カスタム開発で作り込むほどに汎用性は失われ、導入後の変更がしにくくなる。
そもそもフリートコントロールの技術はまだそれほど成熟していないため、標準的な設定だけでは思うように動かないケースも多い。そのような場合、車両メーカーは細かな調整や特殊な設定でそれらの問題を解決することがある。
これは各メーカーのノウハウによるものなので、ユーザーにとってはよく分からず手が出せないものになる。このようにして、ユーザーにとってはブラックボックスのようなAGVシステムが出来上がる。
さらに、メーカーやタイプの異なる車両の統合制御も課題となる。前回も述べたが、AGVの導入を進めていくと、構内を様々な車両が走るようになる。棚搬送、牽引型、フォークリフトなど、サイズも用途も異なる車両が行きかうようになる。
この場合、各メーカー、下手をすれば機種ごとに異なる設定ツールを使用することになり、ユーザーの社内ではツールごとに担当者を置く羽目になる。当然システム同士の連携も取りにくくなる。
●汎用ソフトウエアの登場
このような背景から、様々な車両をワンシステムで統合制御できるプラットフォームのようなシステムが望まれている。異なるタイプの車両でも走って止まるという基本的な機能は同じなのでその部分は共通化され、コンベヤやリフターといった上物を車両のタイプごとに機能モジュールとして使い分ける。そのような汎用ソフトウエアが登場し始めている。
前述のNavitec Systems社の製品にもそのようなラインアップが用意されている。どのメーカーのどんな車両でも対応可能というわけにはいかないが、条件を満たした車両であれば一つのシステム上で制御することが可能になる。
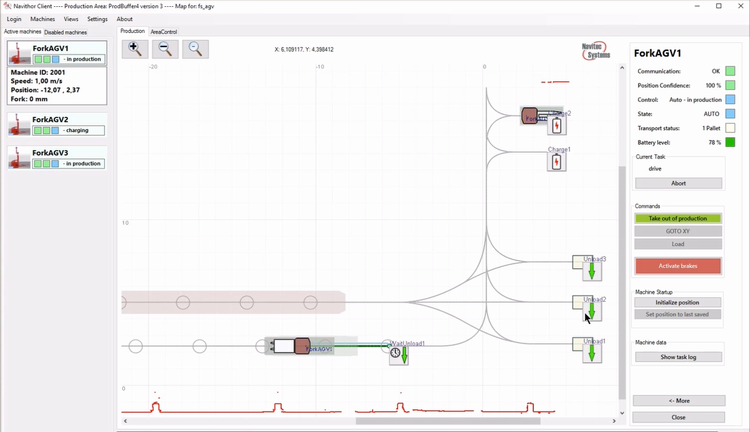
フォークタイプ
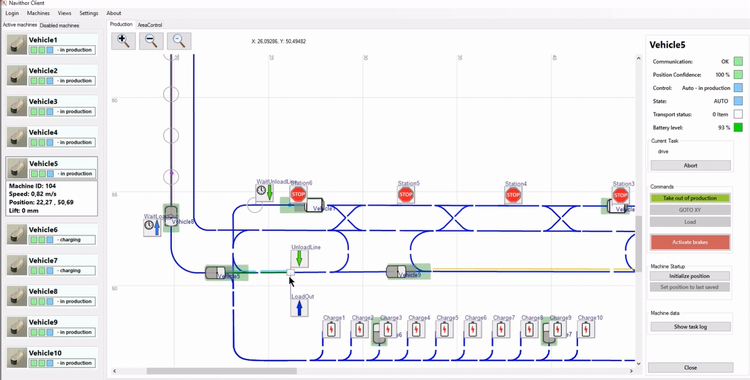
積載タイプ
このような汎用のフリートコントロールソフトウエアは異なるメーカーの様々な車種に対応することを目指しているのでUIも工夫されており、エンドユーザーにとって使いやすいものになっている。マップ上での位置をビジュアル化し、実行中の搬送タスクやバッテリー残量など各車両のステータスを確認できる。
多くの設定がパラメーター化されているので必要に応じて細やかな調整も可能であるし、現場の作業者がタブレット端末からかんたんに操作できるようウェブベースのUIを備えたものも多い。
汎用ソフトの登場により、これまでUIにそれほど力を入れてこなかった車両メーカーもUIの見直しを迫られることになる。それはユーザーにとって使いやすいガイドレスAGVの選択肢が増えていくことを意味する。
どんなに優れた機能を持つAGVでも、ユーザーが使いこなせなければ意味がない。日々の物流量の変化やその時々の作業量に合わせてフレキシブルに運用を変えられる、それがガイドレスAGVの目指す姿だ。
重ねて申し上げるが、ソフトウエアUIの発展がガイドレスAGV普及の重要な要素になると考えている。今後の発展に期待したい。
次回は、WMS(倉庫管理システム)やPLC(制御装置、プログラマブル・ロジック・コントローラー)といった外部システムとの連携について述べてみたい。
(第5回に続く)






