外部システムとつなげる通信機能に着目
リンクス AW事業部
小山早俊 プロダクトマネージャー
物流業界や製造業では深刻な人手不足に加え、新型コロナウイルスの感染拡大で非密集・非接触の重要性が増していることもあり、自動化技術導入の機運がますます高まっています。
その中でも、倉庫や工場の床に誘導のための磁気テープを貼ったりする必要がなく、人に代わって商品や部品を自動で運ぶ「ガイドレスAGV(無人搬送ロボット)」や「ガイドレスAGF(無人搬送フォークリフト)」の注目度が一層アップしています。
ロジビズ・オンラインは先進的な技術を製造業や物流業などにいち早く紹介することを社是としている技術商社リンクスの小山早俊氏に、ガイドレスAGV・AGFの現状や導入する上での重要な視点を全8回にわたって解説していただいております。5回目は外部システムとの連携に関わってくる通信機能にスポットを当てます。
2つのレイヤーで連携
前回まではガイドレスAGVの選定ポイントとして、制御ソフトウエアのコアとなる部分について解説した。
—————————————————–
前回までに述べたガイドレスAGVの選定ポイント
1.自己位置推定能力
2.群制御(フリートコントロール)
3.操作性
—————————————————–
今回は外部システムとの連携に関わる通信機能について解説したい。
AGVは独立した単体のシステムとしての利用は少なく、外部のシステムと連携して用いられることの方が多い。
外部のシステムとは、コンベヤ、加工機などの装置、ロボット、WMS(倉庫管理システム)やMES(製造実行システム)などだ。ガイドレスAGVの導入においても、こういった外部装置との連携ができることは必須条件となる。
ガイドレスAGVと外部装置との連携は、2つのレイヤーに分けられる
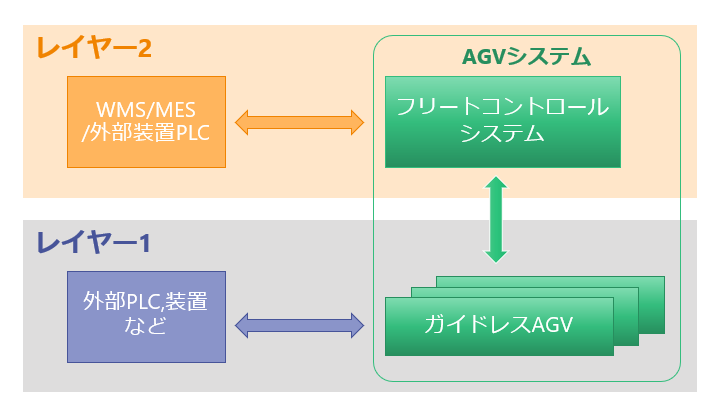
【通信レイヤー】
・レイヤー1:外部装置⇔ガイドレスAGV
・レイヤー2:WMS/MES⇔フリートコントロールシステム
(図はリンクス提供)
●レイヤー1:外部装置⇔ガイドレスAGV
レイヤー1は、AGVと地上設備間の連携である。AGVに対して、外から指示を与えて動かすための通信を行う。
AGVのような移動体と地上側装置との通信には、光通信がよく用いられる。AGVとステーションにそれぞれ通信ユニットを設置し、AGVがステーションに到着するとユニット間で無線通信を行う。ステーションにある設備とのやり取りの他、ルート指示、発進のトリガーも受けることができる。
また、車載のWi-Fi機器を用いて外部装置との通信を行うこともある。例えば、走行経路上にあるシャッターとの連携でAGVが接近の信号を出しながら近づくことで、シャッター側の制御装置がそれを受信しシャッターを開く。AGVは止まることなくシャッターをくぐり、AGVが通り過ぎると通過の信号をうけてシャッターを閉じる、といった具合だ。
こういった装置の制御にはPLC(プログラマブルロジックコントローラー)が使用されることが多いため、AGV側にはPLCとの通信インターフェースが用意されている。このような通信は後述のレイヤー2で行われることもある。
●レイヤー1の通信内容
レイヤー1における通信の情報は例えば次のようなものがある。
・走行情報:一時停止や再開、走行速度など
・経路情報:次の目的地やそこへ行くまでのルートなど
・ステータス情報:AGVの現在位置やバッテリー残量、エラーなどのステータス
・被搬送物の情報:搬送物の種別や固有の管理番号、数量など
このような通信に関わるコマンドが多く用意されていれば、その分、様々な運用が可能になる。通常は自動で走行しているAGVに対して都度マニュアルで操作して走らせるといった使い方もできる。
AGVをどのように使いたいか構想する際に、AGVにどのような情報を与え、あるいはAGVからどのような情報を収集して走らせたいのかを具体的に思い描いてみると良いだろう。エンドユーザとしてはそこまで考えられなくても、経験のある車両メーカーやSIerに大まかなイメージを相談すれば、実現方法のアドバイスが得られるだろう。
●レイヤー2:WMS/MES⇔フリートコントロールシステム
レイヤー2は、より上位のWMS/MESとAGVを地上で管制するフリートコントロールシステムとの連携だ。このレイヤーでは様々な機器を汎用的に接続する必要性や通信データ量の兼ね合いでEthernetが利用されることが多い。倉庫における入庫・出庫や装置などの投入・排出と連動してAGV群による搬送システムを機能させる。
具体的な例を挙げれば次のような流れになる。
1)WMS/MESがフリートコントロールシステムに対し、ステーションAに被搬送物が入荷したとシグナルを出す
2)フリートコントロールが特定のAGVに対し搬送指示(ステーションA→ステーションB)を出す
3)指示を受けたAGVがステーションAで荷物を受け取り、ステーションBに移動して荷物を渡し、搬送完了のシグナルをフリートコントロールに返す
4)フリートコントロールがWMS/MESに対して、搬送の完了を返信する
ガイドレスAGVは既設の磁気テープ式などのAGVシステムとの共存を求められることもあるので、それらを制御するPLCとの通信・連携ができることも必要だ。既設のシステムはガイドレスAGVに比べて状況に応じての判断ができないため、ガイドレスAGV側がうまく気を使って道を譲るなどの判断が求められる。
●レイヤー2の通信内容
レイヤー2における通信の情報はレイヤー1の情報よりもさらに多くなり、次のようなものが含まれる。
・WMS/MESからの指令に対する実行状況や履歴
・制御下にある全AGVの情報:位置、ステータス、実行中のタスク、到着予測時刻など
・経路情報:ルート上の各エリアの交通状況、シャッターやエレベーターのステータス情報
・被搬送物の情報:搬送物の種別や固有の管理番号、数量など
フリートコントロールシステムが取り扱う情報量は膨大になり、トレーサビリティも求められる。搬送自動化の観点からWMS/MESとの通信による搬送タスク実行をしつつ、現場での指示に基づく都度の割り込み指示にも柔軟に対応できなければならない。AGVシステムは様々な指示系統に対応できるよう構成しておく必要がある。
余談だが、上述のようなデータはデータベースで管理されるようになってきている。ユーザー側としてもデータがきちんと残っていれば運行予測や効率化、予兆保全などに利用できるため大きなメリットがある。
…と、ここまで解説してきたが、AGVメーカーのカタログを読んでも外部通信仕様に関する記載はかなり限られている。理由は、AGVメーカーがカスタム開発を前提に考えているためだろう。ユーザーの環境や要望に応じて開発を行う、というスタンスだ。
これはユーザー側の環境や要求仕様が様々であるため致し方ない部分もある。とはいえエンドユーザにとってはかなり分かり難い。何しろこういった外部連携に関する開発は、導入時のリードタイムやコストの増加に大きく影響する。できるだけ開発工数を少なくできる通信仕様へのニーズは高い。
「APIが豊富に用意されていてどんなシステムにも接続可能」というのは理想が高過ぎて現実とは程遠いが、レイヤー1、2のそれぞれについて、標準化された通信プロトコルが用意されたガイドレスAGVやフリートコントロールソフトが登場し始めている。今後、新旧様々なシステムと簡単に連携できる汎用性の高いAGV制御システムが普及することを期待している。
次回は、AGF(無人フォークリフト)の技術について述べてみたい。
(次回へ続く)
著者プロフィール
小山早俊(おやま・さとし)
1978年熊本県生まれ。2006年3月東京大学大学院工学系研究科修了後、同年4月丸紅ソリューション(現丸紅情報システムズ)入社。非接触3Dスキャナ(GOM社)のセールスエンジニアとして経験を積んだ後、隙間段差レーザー計測装置LaserGauge(Origin Technologies社)など複数の新商品立ち上げに従事。外資系マーケティングエージェンシー、ミスミを経て19年12月リンクス入社。フィンランドのAGVメーカーNavitec(ナビテック)担当のプロダクトマネージャーとして事業立ち上げ、新製品や最新技術の日本国内への展開などを担当している。