独自センシング技術手掛けるスタートアップのThinker
“指先で考えるロボットハンド”の実現に取り組むスタートアップのThinker(シンカー、大阪市)は10月24日、赤外線とAIを組み合わせた独自のセンシング技法を駆使し、死角部分を含めた物の形状や鏡面・透明物質の認知を可能にする「近接覚センサー」の機能評価用サンプルの提供を開始したと発表した。
今回のサンプルは、ロボットハンドによるデリケートな素材のピッキング、ロボットハンドを生かして従来の光学センサーでは扱えなかった作業の展開などを考えている企業への提供を想定している。

Thinkerは今後、サンプル提供を通じた顧客の現場での機能評価のフィードバックを受け、引き続き近接覚センサーの製品化・量産を目指す。
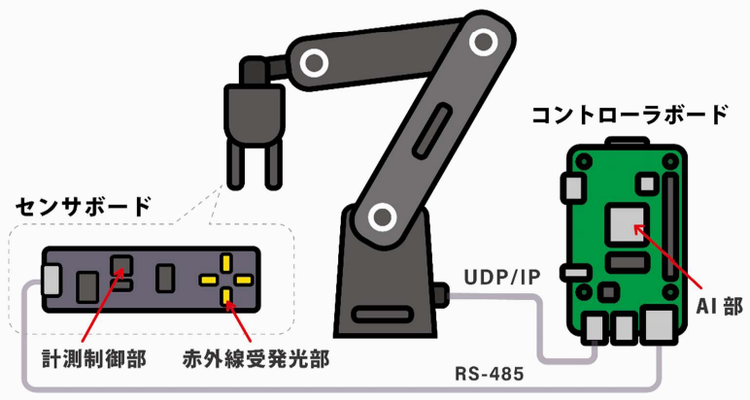
近接覚は、視覚や触覚とは異なる物の認知方法を指す。見たり、触ったりせずに認知するため、「人間にはない感覚」とみなされている。大阪大学大学院基礎工学研究科システム創成専攻の小山佳祐助教による技術シーズを基にしたThinkerの近接覚センサーは、対象物との距離と傾きを同時に計測する独自のセンシング技術を使い、死角部分を含めた物の形状や鏡面・透明物質の認知を可能にした。
独自の高速・高精度なAI技術と組み合わせることで、従来の産業用ロボットでは難しいと考えられてきた、現場に応じた臨機応変なピックアップが可能となるほか、ロボットに作業を覚え込ませるティーチングの負担軽減も促進できると見込む。

Thinkerは、パナソニック子会社のATOUN(アトウン)でパワードウェアの開発に取り組んだ藤本弘道氏が今年8月に設立した。
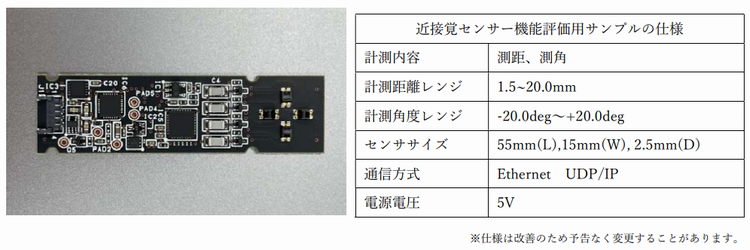
近接覚センサー機能評価用サンプルの仕様
計測内容 測距、測角
計測距離レンジ 1.5~20.0mm
計測角度レンジ -20.0deg~+20.0deg
センササイズ 55mm(L),15mm(W), 2.5mm(D)
通信方式 Ethernet UDP/IP
電源電圧 5V
提供用のサンプルは、既存の環境での評価のしやすさを考慮し、ロボットハンドと制御基板との接続には汎用的な通信規格「Ethernet UDP/IP」を採用している。

(藤原秀行)※写真はいずれもプレスリリースより引用