リアルタイムの気象条件など取り込み、安全運航支援図る
エアモビリティは2月6日、三重県鳥羽市で「空飛ぶクルマ」のナビゲーションシステム「AirNavi」と離着陸場システム「IVport」の実用化に向け、代替のドローンを使用した実証実験を行ったと発表した。

同社は2020年11⽉、東京海上日動火災保険、三重県と空⾶ぶクルマの実証実験と実⽤化に向けた支援に関する包括協定を締結した。今回の取り組みはその一環。

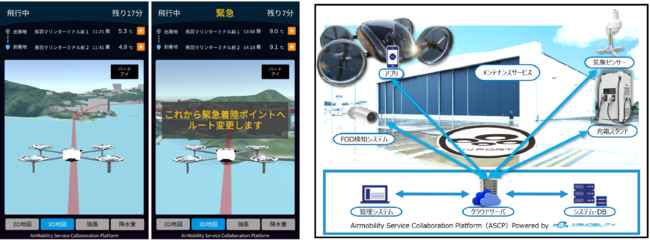
AirNaviの画面とIVPortのイメージ図
AirNaviはルート設定などのナビゲーション機能をはじめ、リアルタイムの気象情報、離着陸場の情報など様々な条件を取り込み、空⾶ぶクルマの安全な運航を支援する。実験では同じくASCPの主要機能となる離着陸場システムのIVportを使い、正常着陸運航と緊急着陸運航の2つの機能確認を行った。
AirNaviに登録されたルート通りにGPSから位置情報を取得し目的地に向かって飛行を実施。目的地に近づいた上空でAirNaviからIVportに対して着陸前確認としてセンサー情報(異物の有無と風向・風速)を確認。IVportからの着陸に関わるセンサー情報を取得した後、AirNaviで着陸可否を判断し、安全な着陸を完了できた。
また、緊急着陸運航として、飛行中に目的地の着陸場に障害物を設置、目的地に近づいた上空でAirNaviからIVportに対して着陸前確認としてセンサー情報を確認。着陸に関わるセンサー情報をIVportからAirNaviに返答。AirNaviは着陸不可否を判断し、新たに緊急着陸先に機体を誘導し、安全に着陸を終えられたという。

■実証実験飛行ルート
鳥羽マリンターミナル周辺海域の下記飛行ルートにて実施。
青:正常着陸ルート
黄:緊急着陸ルート

※国土地理院の空中写真上に飛行ルートを記載
■使用機体
プロドローンPD4B-M
「物資輸送BOX」を連結し、AirNaviアプリ用のタブレットや通信機器などを搭載した。

■本実証事業協力企業(順不同)
・東京海上⽇動⽕災保険株式会社(保険関連提供)
・株式会社プロドローン(ドローン提供)
・パナソニックコネクト株式会社(人物検知システム提供)
・株式会社ウェザーニューズ(気象センサー提供)
・株式会社⻑⼤(Vport提供)
・株式会社ゼンリン(3D地図データ提供)
・三重県(実証実験会場提供・各種支援)
(藤原秀行)※いずれもエアモビリティ提供