

動作などの事前学習期間を数カ月から数日へ大幅短縮、導入ハードル下げる狙い
NECは3月3日、川崎市の研究開発拠点「玉川事業場」で、物流倉庫や工場など向けに、作業内容やレイアウトが頻繁に変化しても柔軟に対応、円滑に作業ができるロボット制御AIを開発したと発表した。
人手不足の深刻化などに加え、トラックドライバーの長時間労働規制が強化される「2024年問題」への対応を物流現場が迫られていることを考慮。ピッキングといった工程を担うロボットを現場で使うため事前に取り扱う製品の形状や動作の範囲などを教え込む学習時間を大幅に短縮、導入のハードルを下げ、現場の自動化・省力化を図るのが狙い。

NECは今後、実際に物流倉庫や工場で技術検証を重ね、2024年度中の実用化を目指している。
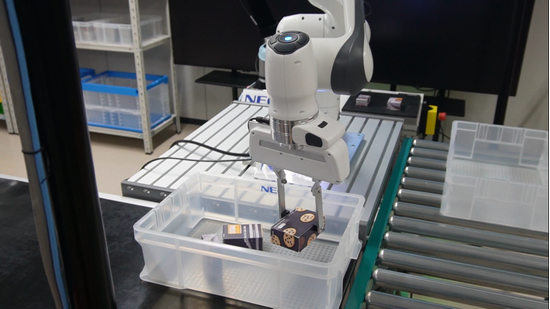
この日公開したデモでは、いつもとは違う向きに商品がケースの中に置かれていても、ロボットハンドが的確につかみ、斜めに傾けるなどしてケースにぶつけずスムーズに取り出していた。
作業内容の変化に柔軟に対応できるロボット制御技術について(NEC提供)
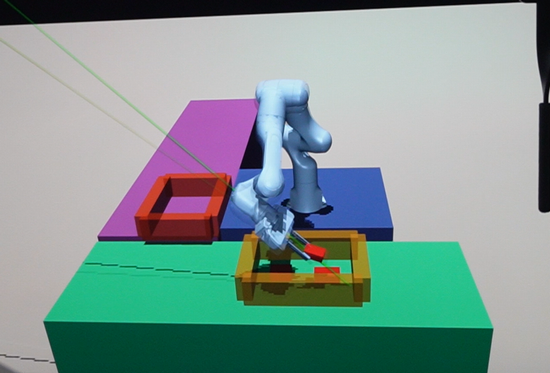
商品が違う向きに置かれるなどした場合、作業を始める前に自動でシミュレーションを実施
スムーズにつかめる
物流倉庫や工場で展開しているピッキングなどのハンドリング作業は、扱う物品の形状・配置などが多様で、ロボットが現場の作業を網羅的に事前学習するには数カ月を要する可能性がある。一方で扱う物品や作業レイアウトは頻繁に変わり得るため、現状では現場へのロボット導入は一部のハンドリング作業に限定され、多くの現場では依然人手に頼っているのが実情。
NECが開発した技術は、ある行動の結果として実世界で何が起こるかを、現実に試すことなく予測することを可能にする「世界モデル」をロボット制御に応用。事前学習の時間を大幅に短縮するとともに、扱う物品や作業レイアウトなどの環境変化にもすみやかに対応できると見込む。
世界モデルは、ロボットが実世界の構造や常識を理解し、将来を想像しながら行動を決定するもので、自律制御の実現における中核の技術として期待が高まっている。
今回開発したロボット制御AIは、世界モデルをハンドリングに応用したもので、過去に試したことのない作業条件でも失敗の少ない最適な動作を自律生成し、実行できるようにした。
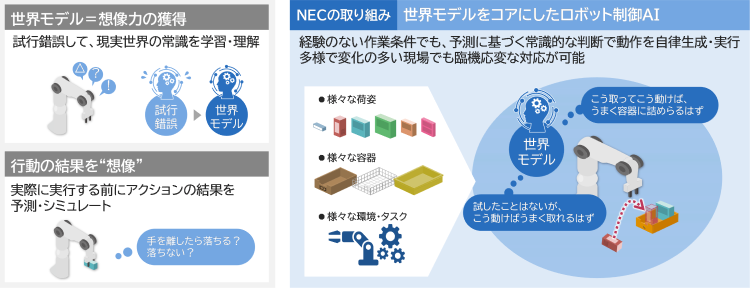
「世界モデル」をコアにしたロボット制御AI
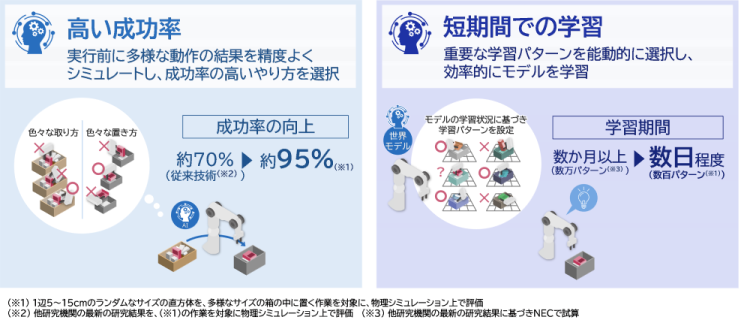
本技術の特長(図はいずれもNEC提供)
(藤原秀行)






