



シード期累計1.1億円、研究開発などに充当
九州工業大学発のスタートアップでロボット開発を手掛けるTriOrb(トライオーブ、福岡県北九州市)は6月21日、全方向型AMR(協働型自律移動ロボット)「TriOrb BASE(トライオーブベース)」の開発と複数台連携による協調的なタスク処理の実装を目指し、6月に福岡銀行と日本政策金融公庫の協調融資で7000万円の資金調達を実施したと発表した。
シード(会社創生期)ラウンドの調達は総額1.1億円に達した。調達した資金は研究開発費と人件費に充てる。


TriOrb BASE
TriOrbは23年2月の創業後、全方向移動ロボットのTriOrb BASEを用いて製造現場でのロボット導入加速や建築現場での資材搬送システムの実装など(共同研究:戸田建設、2023年6月~)、産業応用可能なロボットの足を展開している。
今般調達した資金を基に、23年秋から冬にかけて自律移動ソフトウェア群のリリースと24年度中の協調移動ソフトウェア群のリリースを目指し、開発を加速させたい考え。
TriOrbは「TriOrb BASE」で重労働や劣悪な環境での作業、人手不足等の産業界が直面する課題の解決を目指している。TriOrb BASEは従来の全方向移動機構に比べコンパクトさを有しながら高い走破性や移動性能を持つため、製造現場や建設現場などの荒れた床面や狭い場所での活用、精緻な移動が必要な場面での活躍が期待されている。メンテナンスの簡易性も大きな特徴。
23年4月にはTriOrb BASEのトライアル(レンタル)および販売を開始した。
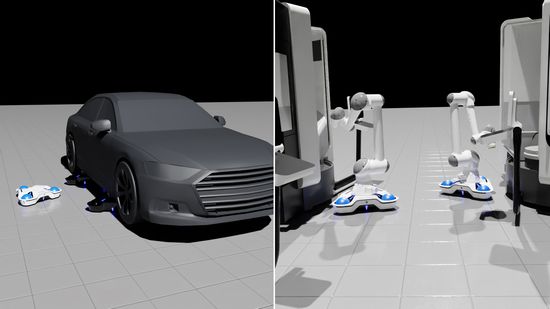
協調搬送・作業のイメージ図。(左)協調制御による重量物の分散支持 (右)協調作業によるタスクの効率化(いずれもTriOrb提供)
(藤原秀行)






