高精度地図が不要、工事区域や新設区間でも安全に走行目指す
自動運転技術開発を手掛けるティアフォーは5月2日、ドイツで自動運転技術開発に携わっているスタートアップのdriveblocks(ドライブブロックス)と連携し、高速道路を走行するトラック向け自動運転システムを開発すると発表した。
2024年度に新東名高速道路で実証実験を始める。開発した成果はリファレンスデザイン(参照設計)として商用車メーカーに提供。高速道路を走る長距離輸送トラックへの自動運転機能の早期導入をサポートする。

併せて、自動運転支援道やデータ連携基盤を含むインフラの活用にも注力、物流業界のデジタル化を後押しする。
リファレンスデザインはオープンソースの自動運転ソフトウェア「Autoware(オートウェア)」の基本機能に加え、4月に開始した独自プログラム「TIER IV Autoware Partner Program」の参画企業と協業して得られる、高速道路トラックに特化した機能も含む。
実証実験はドライブブロックスの技術を活用して自動運転システムの開発を進める予定。具体的には、長距離・広域の高速道路環境に対応するため、高精度地図を必要としない認識技術を採用する。
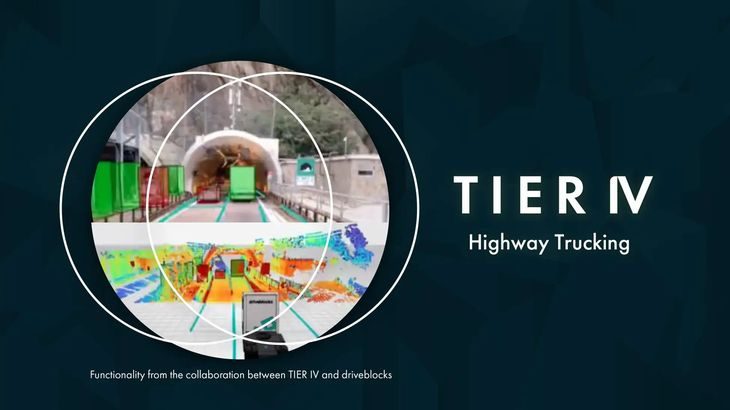
同技術は既にオーストリアとイタリアの間に位置するブレンナー峠など走行難易度の高い環境で実証が進められており、国内の新東名高速道路を想定したテストコースとシミュレーション環境を活用して検証を展開している。
ティアフォーとドライブブロックスの技術を組み合わせることで、高速道路の工事や新設区間など、高精度地図が未整備だったり最新データが反映されていなかったりする場合でも、冗長性と安全性の高い自動運転を実現できると見込む。
2024年度内の実証実験に向け、両社は高速道路の一般的なシナリオに加えて、衛星測位システムが利用できないトンネルや低照度の環境など、様々なシナリオ下で時速100kmでも正確に認識機能が動作するかどうかの検証や走行車線のモデル作成を完了させ、リファレンスデザインとして提供する。
ティアフォーは高速道路トラックが合流車両や障害物などの周囲を認識し、安全に走行できるよう、物体検出機能の向上も図る。
国内での実証状況:前方カメラから検出された車線マーキング(左)と検出された道路の鳥瞰図(右)
(藤原秀行)※いずれもティアフォー提供