「力触覚制御技術」を活用、スムーズな遠隔操作可能に
オカムラと慶応義塾大学発のスタートアップ、モーションリブ(川崎市)は2月12日、資本・業務提携契約を締結したと発表した。具体的な出資額は開示していない。
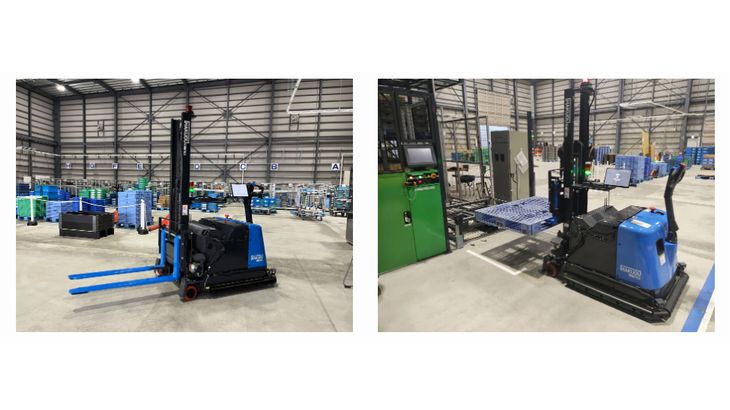
オカムラが事業化を進めている、自律・遠隔操作ハイブリッド型ロボットによる物流自動化ソリューション「PROGRESS ONE(プログレスワン)」で、モーションリブの力触覚制御技術「リアルハプティクス」を活用。物流現場の自動化・省力化を促進するとともに、時間や場所の制約にとらわれない新しい働き方や新しい価値を共創していくことを目指す。

併せて、オカムラ自社工場の製品製造工程にロボット技術を活用していくことも想定している。
モーションリブは、ロボットの力加減をリアルタイムに制御できる技術「「リアルハプティクス」で、機械への実装を可能にするための研究開発から、キーデバイスの「AbcCore(力触覚制御ICチップ)」の製造販売までを手掛けている。
遠隔からの作業を器用かつ的確に人間のように実現するためのソリューションを展開している。提携により、オカムラの「PROGRESS ONE」で遠隔のピッキング作業にリアルハプティクスを取り入れ、ロボットが人のように力加減をしながら作業ができるソリューションの開発を進める。
2022年に、オカムラの「PROGRESS ONE」事業化に向けた取り組みの一環として、物流ピッキングロボットの遠隔操作時の力覚フィードバック効果の調査研究をモーションリブと共同で実施していた。この研究では、ピッキングなどの物流施設内作業を想定した遠隔操作ロボットシステムで、オペレーターが遠隔地からディスプレイを見ながら作業を行う際、複雑な動作になるほどロボットが物体と接触した時の引っ張られる・押されるなどの力覚情報を人に知覚させる力覚フィードバックの重要性を実証し、課題を検討した。
研究結果から、力覚フィードバックが遠隔での把持操作や緩衝材の押し込みを効率的に行うために必要不可欠な機能であると判断。モーションリブのリアルハプティクスを活用したピッキングロボットの遠隔操作システムの開発に踏み切った。
(藤原秀行)