

全地球測位システム届かなくてもOK、高解像度カメラで撮影
商船三井と自律制御システム研究所(ACSL)は6月11日、商船三井が運航する石炭運搬船の船倉内で国産ドローンを使った自律飛行点検の実証実験を5月に行い、成功したと発表した。
石炭運搬船は貨物の石炭を入れるための広い船倉(ホールド)を有しており、高さは底面から20メートルに及ぶものもある。高い場所は人がアクセス困難なため点検が難しかった。
その解決方法として、ドローンを用いた点検手段も挙げられるが、産業用ドローンの多くは、全地球測位システム(Global Navigation Satellite System=GNSS)からの信号を受信することで位置情報を把握しており、ホールド内はGNSS電波が届かないため自己位置を認識できず、熟練したパイロットによる船上での手動操縦を必要とするため、負荷が大きかった。
今回の実証実験は閉鎖されて暗く、かつGNSS電波が届かないホールド内で、レーザー照射により自己位置推定を行うLiDAR SLAM(ライダースラム)技術を実装した国産ドローン「ACSL-PF2」を用いて自律飛行させることに成功した。
併せて、ドローンとパイロットのモニタリング端末を光ファイバーケーブルによって有線接続し、電波干渉が生じやすく無線通信に適さない環境のホールド内でも安定した通信環境を実現、安全な自律飛行を可能とした。
さらに、従来のホールド内点検に使用されていたドローンと比較し、高解像度のカメラを搭載することで、暗所の中でも精細な点検画像を撮影できたという。
今後はドローンの自律飛行という特徴を生かし、乗組員でも容易に運用可能なドローンの開発に取り組むとともに、様々な種類の船のホールドやバラストタンクといった閉所・暗所区画を含む環境での飛行点検の開発にも着手する方針だ。

ACSL-PF2

実験に使用した機体
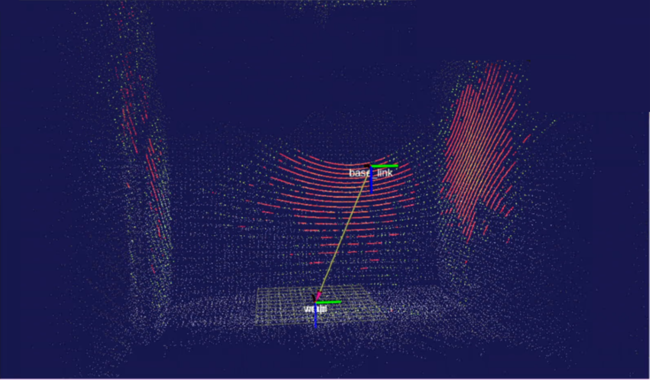
LiDARを用いたホールド内での自己位置推定処理の様子
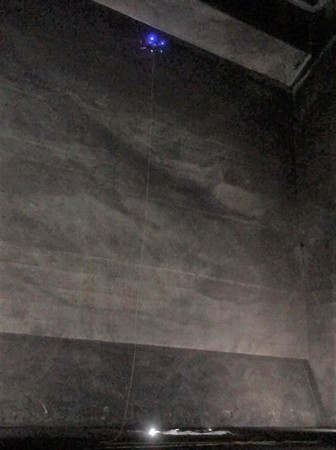
ホールド壁面を撮影している様子
(画像はプレスリリースより引用)
(ロジビズ・オンライン編集部)






