障害物検知し停止しても迅速に復旧、効率的な運用支援
ロボットの制御システムシステムを手掛ける東京大発ベンチャーのキビテク(東京都品川区西五反田)は9月13日、各種ロボット開発などを手掛けるピーエムティー(福岡県須恵町)のオフィスを活用し、キビテクが開発中の高度自律型遠隔制御システム(HATS)の実環境における試験運用を実施したと発表した。
HATSは遠隔オペレーターが簡単な操作で要点のみをAGV(自律搬送ロボット)に指示し、障害物を検知して停止したAGVの復旧作業などを効率的に行えるようにするサービス。既存のAGVにアドオンすることで遠隔制御が可能になる。

今回の試験運用では、AGVの設計・開発を担う匠(福岡市)が開発している、オゾンガスによる空気除菌を行う「タクミクリン」に遠隔制御用の装置をアドオンし、HATSのシステムと接続。自律走行中のタクミクリンがオフィス内の通路上に置かれた障害物を見つけて一時ストップした際、HATSのシステムを使い、ネットワーク経由で遠隔のオペレーターに通知を送り、オペレーターが状況確認と復旧作業を行って再び自律走行の状態に戻すという一連の流れを試験した。
その結果、AGVの停止状態からの復旧を遠隔からスムーズに完了、効率的な運用が可能になることを実証した。
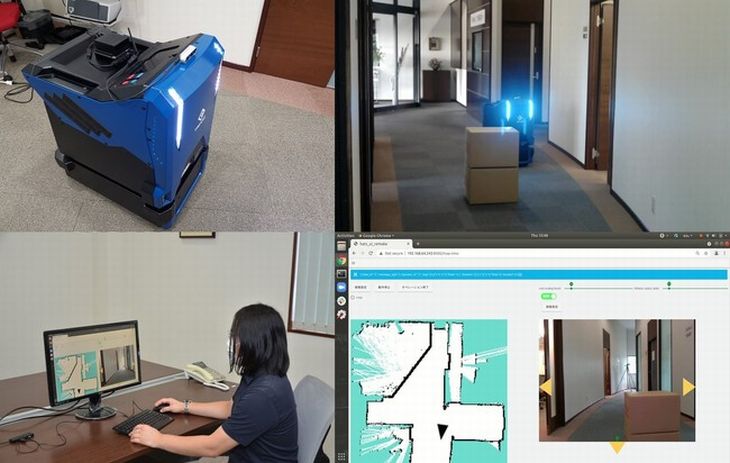
(左上)HATSをアドオンしたタクミクリン
(右上)通路上の障害物で停止したタクミクリン
(左下)遠隔でのオペレーター操作の様子
(右下)オペレーター画面(ロボットカメラとLiDAR情報から操作)
キビテクは今後、さまざまな既存のAGVにHATSのシステムを搭載し、オフィス環境の巡回以外に、物流・工場などの施設内搬送や警備・清掃・点検といったサービスへの適用も視野に入れ、実運用に向けて開発を行う考えだ。
(画像はプレスリリースより引用)
(ロジビズ・オンライン編集部)