

人などと共存可能な環境整備
パナソニックホールディングス(HD)は6月1日、人や他のロボットが共存する環境下でもロボットの効率的な走行経路を計画できる技術を開発したと発表した。
屋内などの限られたスペースで人と多種・複数のロボットが共存する環境における自律走行ロボットの活用シーンを広げる技術と期待している。

近年、労働人口の減少に伴う労働力不足を背景に、自律走行ロボットの開発・実証の動きが産業界で広がっており、パナソニックグループも実際のオフィスビルで複数ロボットの群管理制御の実証実験に取り組むなど、ロボットフレンドリーな環境の構築を目指した取り組みを進めている。特にオフィスビルのような狭い屋内環境では、人や別のシステムの制御下にある複数のロボットと衝突することなく、かつ効率的に走行できることが求められる。
しかし、ロボットが衝突を避ける際に減速や停止を繰り返すと、そのたびに目的地までの到達時間に遅延が発生するため、効率的な走行を実現するためには遅延時間を考慮した非常に難易度の高い走行経路計画技術が要求される。
パナソニックHDは、ロボットの通過時間に関する確率分布のパラメーターを、観測データを基に事象の背後にある確率分布を推定する方法「ベイズ推論」で遅延が観測されるたびに更新することで、効率的に走行経路を計画可能な技術を生み出した。
本技術は問題設定と先進性が国際的に認められ、マルチエージェント技術のトップカンファレンス「AAMAS 2023(The 22nd International Conference on Autonomous Agents and Multiagent Systems)」に採択された。
自律走行ロボットが労働力不足に貢献できると見込まれるユースケースのうち、ビル内の通路など、自律走行ロボット同士がすれ違えないほどの狭い通路が含まれる例は少なくない。さらに、多くの場合、通路には通行人や別のシステムの制御下にある多種・複数のロボットが存在する。
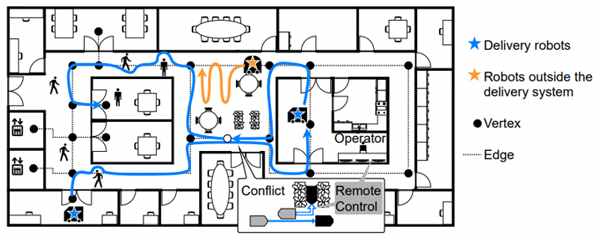
ビル内ロボット配送における課題設定の概要。配送ロボット(青線)がオフィスビルの会議室にいる顧客に商品を届ける。ロボットは遠隔オペレーターの監視の下、歩行者やお掃除ロボット(オレンジ線)を避けながら進む
走行時の遅延の確率分布が事前に分かっていることは少なく、実際は不明、あるいは限られた事前情報しか得られない場合が多いため、ロボットの走行中に観測された遅延を踏まえて次の計画を作成することを強いられる。
これまで、MAPF(Multi-agent Path Finding)という、グリッド状のグラフ上で複数ロボットが衝突しない経路を作成する問題設定が研究・応用されてきたが、従来の手法では遅延の確率分布を正確にモデル化できていることが前提となっており、通路にいる人やロボットの数が変動する、実際の暮らしや仕事の現場に適用することは困難だった。
そこで、パナソニックHDは、ロボットが特定の経路を走行する際の遅延をパラメーターが未知なガンマ分布に従うものと定義し、走行中に得られる遅延の観測値を用いて確率分布のパラメーターをベイズ推論で遅延が観測されるたびに更新することで、推定したパラメータに基づき最適な走行経路計画を作成する手法を開発した。
本手法は、シミュレーション実験の結果、従来のやり方よりもロボット同士の鉢合わせを約半分に減らし、目的地までの移動時間が短い走行経路を計画できることを実証した。
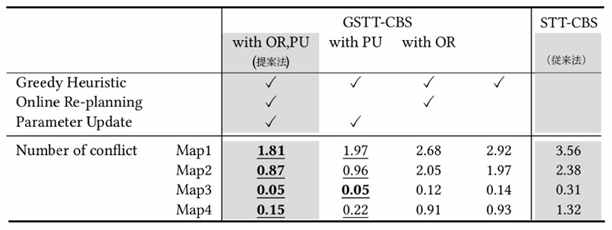
シミュレーション実験の結果。ロボット同士が鉢合わせした回数(100回のシミュレーションの平均)について、今回開発した走行経路計画法(左端列)では、従来法(右端列)に比べてロボット同士の鉢合わせ回数を約半分以下に低減した
(藤原秀行)※いずれもプレスリリースより引用






