走行中EVへの給電、ネットワークサービス利用可能など想定
大林組は9月26日、モビリティ変革に対応した未来社会における道路・モビリティインフラ「e-MoRoad(イーモロード)」を実現するための実証実験を、業界の枠を超えた多様なパートナーと協業し、大林組技術研究所(東京都清瀬市)で開始したと発表した。
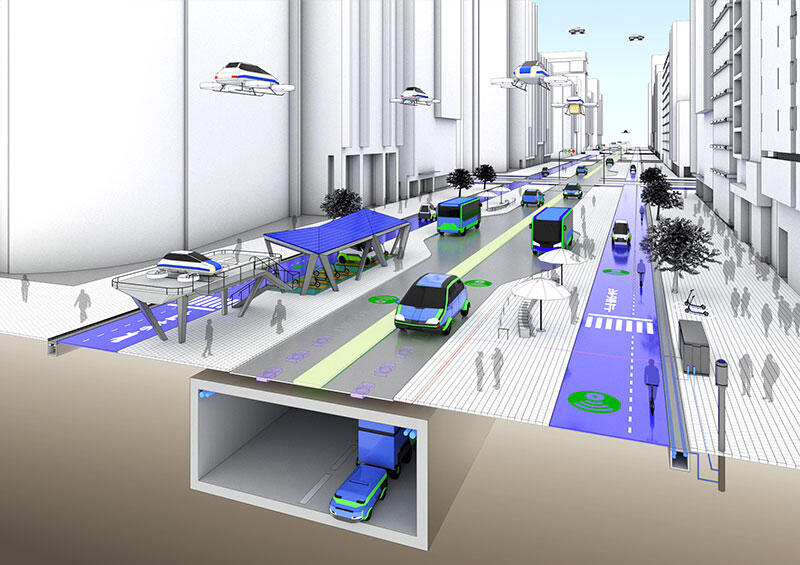
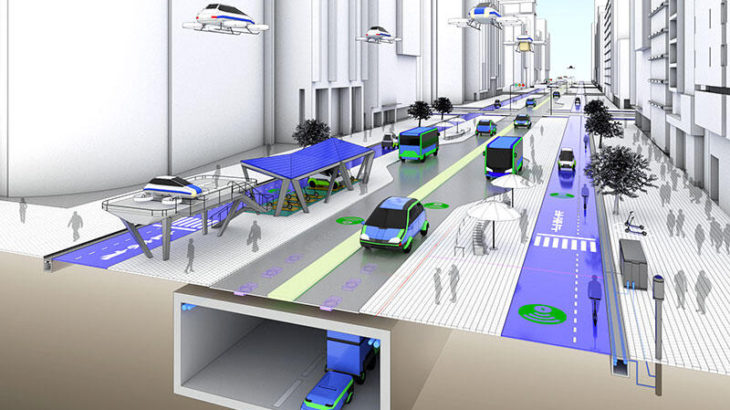
次世代道路・モビリティインフラ「e-MoRoad」イメージ
「e-MoRoad」は、車が走ることだけを想定した従来の道路とは異なり、電気自動車(EV)の停止・走行中の給電や、ネットワークサービスを享受するための通信の確保に加え、道路センシングによるデータ連携、多様なモビリティに乗り換えるためのポートなどを整備。人や物が自由かつ快適に移動できることを実現する新たなインフラと位置付けている。
道路を走行する自動車メーカーに加え、ネットワークやセンシングのための機器メーカー、既存の道路インフラを支える国、地方自治体および道路会社、そのほか各種研究や認証を行う関連団体と連携。自動車の走行中のネットワーク通信の確保や停止・走行中のEVへの給電などの要素技術について開発と実証を本格化させた。
主な実施内容は下記の通り。
走行中の電気自動車に非接触給電する道路舗装技術
連携先
株式会社デンソー(共同研究)
実証概要
電気自動車に走行中に給電することで、充電作業の削減や走行距離の延長、車載用蓄電池の小型化が実現し、EV普及に貢献。
給電効率を確保するためには、いかに道路の浅い層に給電パネルを埋設するかが重要であり、給電パネルを大林組が開発した繊維補強コンクリート「ユニバーサルクリート」で保護することにより、厚さ数cmの浅い埋設による給電効率の向上を実証する。
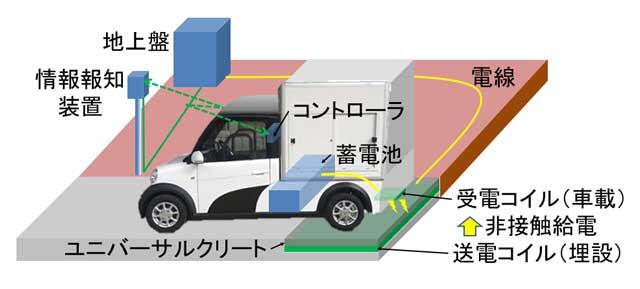
システム構成

走行中非接触給電
道路に電力・情報ネットワーク網を構築する技術
連携先
古河電気工業株式会社(共同研究)
実証概要
自動運転車の普及に伴う車対車、歩行者対車間の安全確保には、道路にセンシングデバイスを効果的に設置し、双方が情報共有する必要があり、そのためには、電源・制御・通信ケーブルネットワークを構築しなければならない。大林組と古河電気工業が共同開発した「雨水側溝兼用樹脂製トラフ」は、雨水側溝とケーブル収納トラフを兼ねることで、配電線路構築のために道路構造を変えることなく、低コストでのネットワーク構築が可能。今後、雨水排水性や耐久性、施工性などの実証を進める。

雨水側溝兼用トラフ敷設写真
自動運転を支援する道路インフラ技術
連携先
株式会社タジマモーターコーポレーション、名古屋大学、株式会社エクセイド、株式会社ダイヘン
実証概要
自動運転により、正確な位置で走行・停止できるため、道路から給電を行う際の効率的なルートや、停止位置の給電コイル面積を検証することで、非接触給電システムのコストが低減できる。「レベル3」の自動運転システムと、停車中の非接触給電システムを組み合わせて、自動運転の特性の把握を含めて実証する。

自動運転車と停車中非接触給電
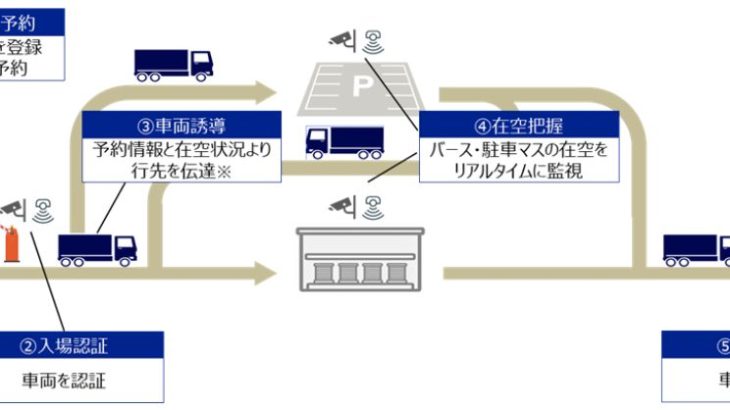
MaaSシステムを運用する技術
連携先
名古屋大学、一般社団法人ライフアンドモビリティ
実証概要
多様な交通手段とサービスを提供するためには、それを管理するシステムインフラが重要。街全体で有用性を向上させるサービスの創出や、データ連携基盤の構築に向けて、自動運転車やキックボードなどのマイクロモビリティを統合し、利用予約や管理機能を有するMaaS(次世代型総合移動サービス)システムを実証する。

左:WEBアプリ画面(利用者用)、右:WEBアプリ画面(管理者用)
(藤原秀行)※いずれもプレスリリースより引用