



「近接覚センサー」活用、破損や損壊のリスク大幅低減
大阪大学発のスタートアップでロボット開発を手掛けるThinker(シンカー、大阪市)は7月3日、ユアサ商事と共同で、近接覚センサーを活用して、クッキーやせんべいのような食品や薄型の樹脂成型品、金属部品などに最適な独自のロボットアームシステムを開発したと発表した。
さまざまな製造現場で、破損などのリスクやコストの高額化が原因でこれまで実現が難しいとされてきた「薄く壊れやすいプロダクトのピッキング」が可能となり、外観検査の自動化も促進できると見込む。物流業界への導入も期待できそうだ。

一部の繊細なプロダクトに関しては、従来のカメラシステムに頼ったロボットハンドでは対象物との間の距離感を把握するのが難しく、破損や損壊などを引き起こすことが少なくなかった。生産ラインから人の手による作業を完全になくすことができず、「一部の自動化」にとどまっているケースも散見された。
こうした課題に対し、両社は吸着パッドを用いつつ、その場でその都度、非接触のまま対象物の距離や姿勢を把握できるThinkerの「近接覚センサー」を活用することで、破損や損壊リスクを大幅に軽減。低コストかつ高速で、壊れやすいプロダクトをピッキングできるロボットシステムを構築し、「薄く壊れやすいプロダクトのピッキング」の課題解決に至った。
今後は製造現場での実証試験を経て仕様を確立し、早期の製品化を目指す。

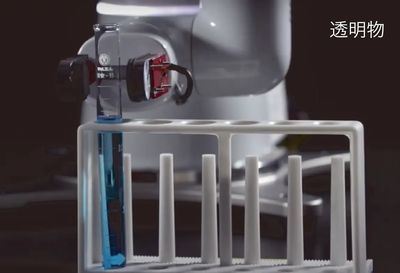
Thinkerの近接覚センサーはカメラを用いることなく、赤外線とAIを組み合わせた独自の高速・高分解能なセンシングにより物の位置と形を非接触かつ高速に把握できるのが特徴。
従来の産業用ロボットでは難しいとされていた鏡面・透明物質の取り扱いや、現場環境に応じた臨機応変なピックアップが可能となり、ロボットハンドによるピッキングの可能性を飛躍的に広げられると見込む。ティーチング(ロボットに作業を教え込む工程)の時間や労力も大幅に減らせることから、これまでとは異なる領域でのロボットハンドの活用も想定できるという。


近接覚センサーTK-01の紹介動画
動く対象物をセンシングすることで把持部が追従する動画
(藤原秀行)※いずれもThinkerなど提供






