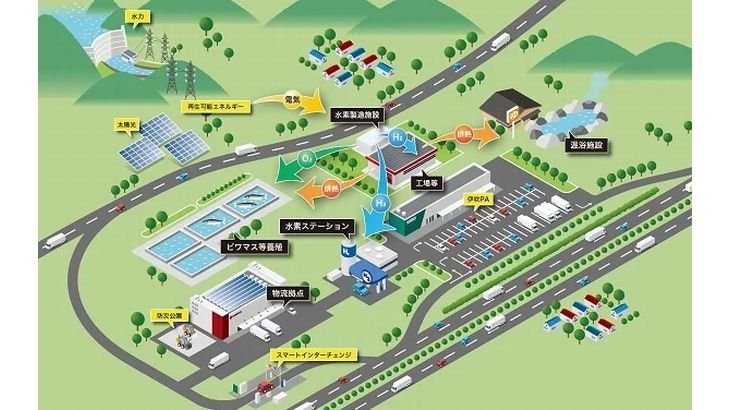
無線ネットワークのリアルタイム予測と最適制御で、遮蔽物や通信量増加に対応
NECは9月6日、倉庫や工場における自動搬送ロボット(AGV)を遠隔制御する際、無線通信の遅延を抑えて安定化することでAGVの停止や不安定な稼働を回避し、高い作業効率を実現する技術を開発したと発表した。
2024年度中に実際の倉庫で実証実験を行い、25年度の実用化を目指す。

開発技術の概要
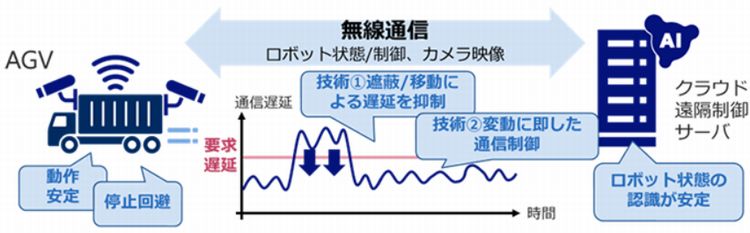
AGVを遠隔制御する場合、現場の無線ネットワークを通じてAGVの状態認識および制御データの配信、搭載カメラで撮影した周辺映像の配信などを行う。この際、柱・壁・設備などの遮蔽物や移動の影響で通信品質が低下し、円滑な制御に必要となる通信の遅延要件を超過することがある。
また、映像データや制御データなど通信トラフィックが混在し、無線リソースの競合(順番待ち)が発生、通信遅延が変動することもある。こうした事象はAGVの稼働停止や状態認識・制御の不安定化を引き起こしてしまう。複数の無線ネットワークでつながりやすい環境を構築することである程回避できるが、通信量が増大しアクセスが集中(輻輳)すると、通信の断絶や遅延が発生し、制御が不安定になっていた。
新技術は通信の状態をパケット単位でリアルタイムに分析し、変動する通信品質を予測した上で、最も遅延が少ない無線ネットワークに切り替える技術を開発。品質の良いネットワークに接続し続けることができるため、通信遅延を抑え、AGV制御における通信の遅延要件の超過を避け、稼働停止を回避できるようになると見込む。
また、あらかじめ設定したデータの内容や、要求される通信性能の要件(帯域、通信遅延および遅延の変動など)に応じてデータの送信タイミングを調整する、通信トラフィックの制御技術を確立した。例えば、映像データはAGVの稼働に影響のない範囲で遅延を許容しつつ、制御データは優先して送ることで、AGVの安定稼働を後押しできるという。

技術の詳細
新技術は遠隔地のサーバがロボットの監視や制御を行う、あらゆるシステムに適用できる。将来は自動運転の遠隔管制、ドローンの遠隔操縦、建設機械の遠隔制御など、様々なシステムの安定稼働に貢献できるようにしたい考え。
新技術は「国際物流総合展2024」に出展する。
(藤原秀行)※いずれもプレスリリースより引用