


25年4月までに実用化目指す
竹中工務店と鹿島、建機レンタル大手アクティオの3社は12月17日、建設現場で資機材を自動搬送するロボットを開発したと発表した。
工事用エレベータに積み込まれた資機材を決められたフロアで荷下ろしし、3Dの建物BIMデータから作成した自動走行用地図を基に、フロアの所定の位置まで自律移動する。

今年7月に大阪市内の建設現場で投入、実際に自動搬送できることを確認した。
建設工事は必要な資機材を必要な場所に遅延なく供給することが重要。建設現場の資機材搬送は、建設作業員にとって付帯作業のため、自動化することによって、より高いスキルが求められる作業に人間を配置できるようになると見込む。
休憩時間、夜間などの人が少ない時間にも資機材の搬送作業を自動で行えるため、揚重・水平搬送効率の向上も図ることができると想定している。3社は2025年4月までに国内の建設現場でロボットの試行を重ね、実用化を図る予定。
さらに、建設RXコンソーシアム「資材の自動搬送システム分科会」の活動を通じて、適用現場数の拡大に向けた改良開発を進め、建設業界全体の生産性や魅力向上につなげていきたい考え。
ロボットを商品化した際のレンタル窓口はアクティオが担当する。
資機材自動搬送ロボット
仕様
外形寸法[㎜]L2,386×W988×H920
最大可搬重量[㎏]2000
本体質量[㎏]660
搬送対象 パレット、台車、ボード材
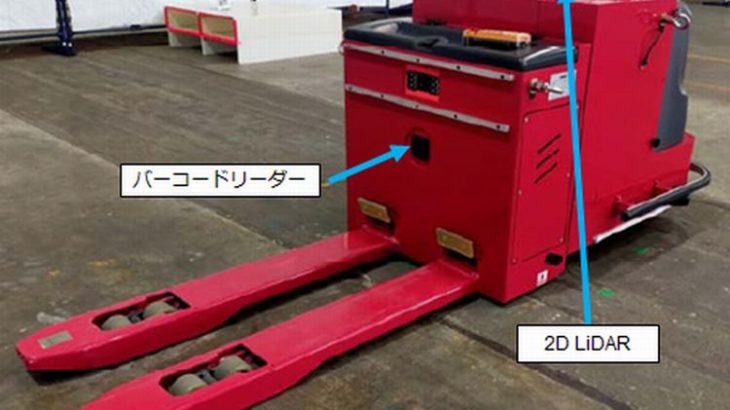
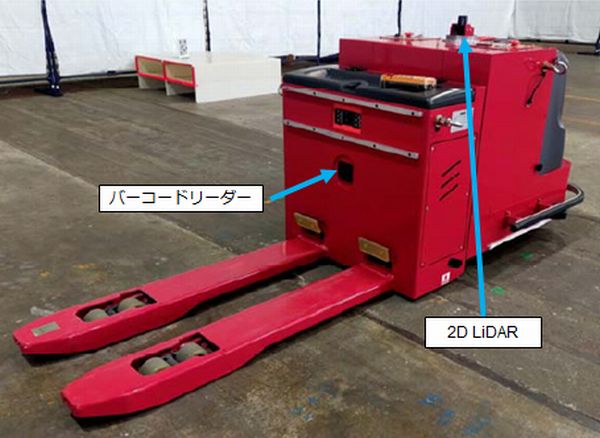
資機材自動搬送ロボットは、本体上部に2D LiDARおよびバーコードリーダーを搭載している
ロボットと工事用エレベーター、竹中工務店が開発した「建設ロボットプラットフォーム(RPF)」、鹿島が開発した「自動搬送管理システム(JHSアプリ)」をそれぞれ連携させ、資機材の自動搬送の仕組みを構築した。「自動搬送管理システム」は搬送予約・調整、搬送ルートの指示および実績収集を行い、「建設ロボットプラットフォーム」は同システムから指示を受けて、各種ロボットの搬送経路をBIMデータと連動させて生成し、運行制御や状態管理を行う役割を担う。
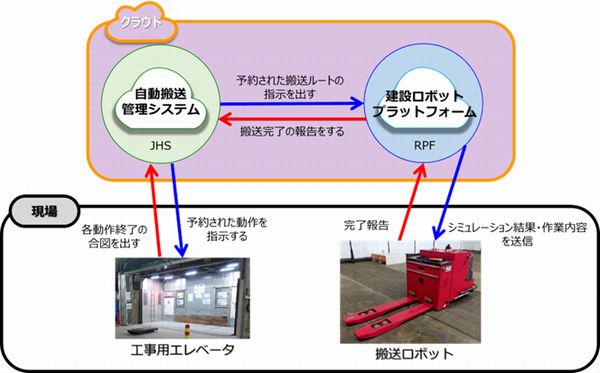
自動搬送の仕組み
(藤原秀行)※いずれも3社提供






