物流業界の人手不足に対応目指す
川崎重工業は11月29日、労働力不足など物流業界が抱える課題解決に貢献するため、同社が開発した無人VTOL(垂直離発着機)「K-RACER」と配送ロボットの連携による無人物資輸送の概念実証を実施、成功したと発表した。
同社は2030年に目指す将来像として制定したグループビジョン2030の中で「安全安心リモート社会」「近未来モビリティ」「エネルギー・環境ソリューション」を今後注力するフィールドに設定。このうち「近未来モビリティ」の中で無人VTOL機や配送ロボットを開発している。
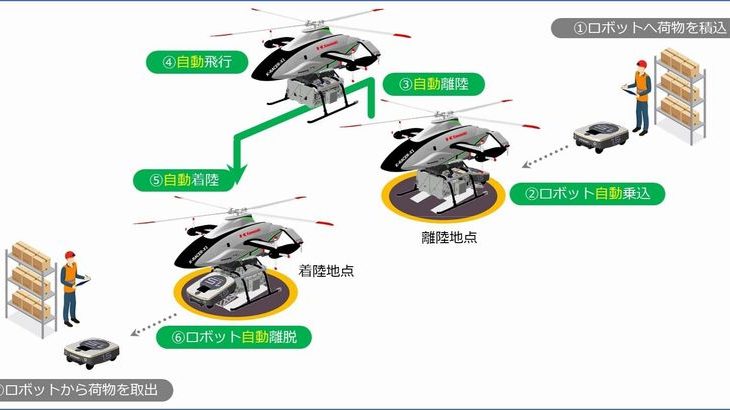
実証では、荷物を積載した配送ロボットが無人VTOL機に自動で乗り込み、配送ロボットを積載したまま自動飛行。着陸後に配送ロボットが自動で離脱し、荷物を届けた。将来は人の手を介さない完全無人で荷物を輸送できることを確認した。
無人VTOL機は今後、長野県伊那市から委託を受けて実施する「無人VTOL機による物資輸送プラットフォーム構築事業」でも使用する予定。
今回使った無人VTOL機は20年に飛行試験を実施した機体を改修してペイロード100キログラムを実現。配送ロボットと連携できる機構も搭載した。パワーユニットはカワサキモータースが製造するモーターサイクル「Ninja H2R」のスーパーチャージドエンジンを採用した。
一方、配送ロボットは荒れた路面や段差のある道路でも安定して走行できるように開発したものをベースに、無人VTOL機への搭載が可能な車両として開発している。
川崎重工は実証で得られた知見を活用し、道路交通状況や海山川などの地形特性に左右されないスピーディーな物資輸送と、山小屋や離島などへの安定した物資輸送のためのシステムを開発することを目指す。
※以下、プレスリリースより引用(一部、編集部で修正)
概念実証の概要
①手動積み込み:有人での配送ロボットへの荷物積み込み
②ロボ自動乗り込み:配送ロボットが自動走行を行い、駐機中の無人VTOL機へ接近、自動で乗り込む
③自動離陸:無人VTOL機が配送ロボットの乗り込み後に自動で離陸
④自動飛行:無人VTOL機があらかじめ定められた経路を自動で飛行
⑤自動着陸:無人VTOL機があらかじめ定められた着陸地点に自動で着陸
⑥ロボ自動離脱:無人VTOL機が着陸後、配送ロボットが自動で無人VTOL機から離脱を図り、荷物の配送目的地へ自動走行
⑦手動取り出し:配送ロボットが自動走行で配送目的地へ到達後、有人で荷物を取り出す

無人VTOL機
駆動方式:レシプロエンジン型(Ninja H2R向けスーパーチャージドエンジン)
飛行形態:垂直離着陸方式
制御方式:自動飛行
ペイロード:100 ㎏
配送ロボット
駆動方式:電動
制御方式:自律走行型
無人VTOL機との連携:無人VTOL機への接近・乗り込み・離脱を含め全自動で連携
(画像はプレスリリースより引用)
(ロジビズ・オンライン編集部)