島津製作所やNTTデータと連携、フォークリフトの積み降ろしなどデータ収集
三菱ロジスネクストは4月13日、島津製作所やNTTデータと組み、2022年8月から経済産業省が実施する令和4年度(2022年度)「物流MaaSの実現に向けた研究開発・実証事業」実施団体として、各種センサーなどを用いたトラック積み降ろしを中心とした荷役作業を対象に、トラックドライバーの作業負荷の度合いやフォークリフトの荷重などを可視化する実証実験の成果を公表した。
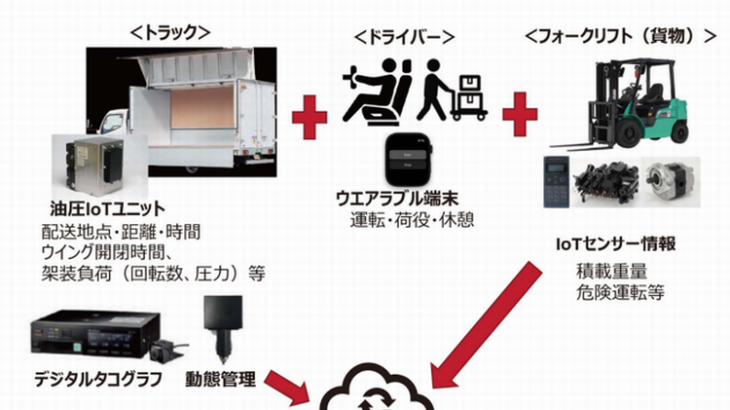
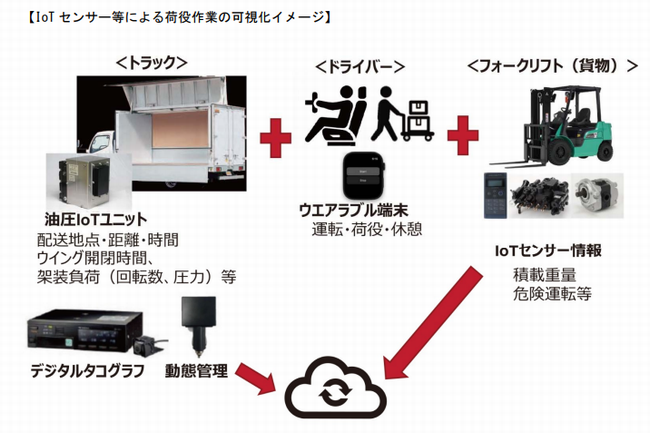
三菱ロジスネクストはプロジェクトで実証事業全体取りまとめ、フォークリフト挙動データ取得・分析を、島津製作所は独自開発の油圧IoTユニット(製品化未定)によるトラックとフォーク荷役機構の油圧データ取得・分析を、NTT データはフォークリフト荷重計画像データ取得・分析、ドライバー行動センシングモデル構築をそれぞれ担当。実用化に向け、一定の成果を挙げられたという。

プロジェクトは労働人口減少や「2024年問題」対応などでトラックドライバー不足が深刻化する中、「自主荷役」と呼ばれるドライバーによる積み降ろし作業の改善と荷主現場における荷役作業の実態把握の重要性が高まっているのに対応して実施してきた。
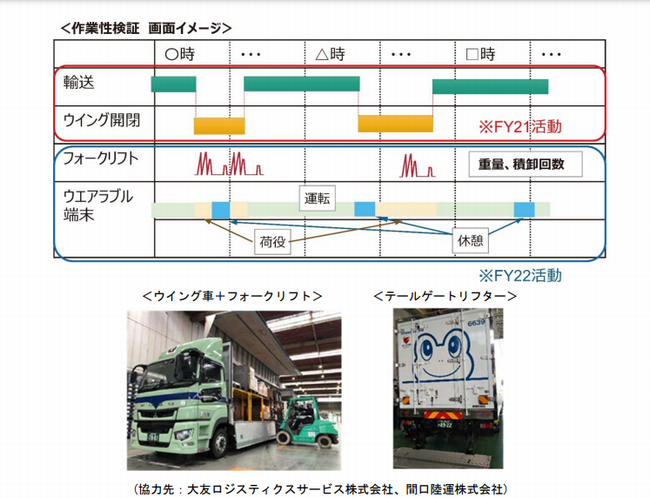
実証実験は2022年8月から今年3月まで実施。 架装事業者の協力を得て、ウイング車やテールゲートリフター(TGL)車の駆動源となっている油圧ユニットを島津製作所製のIoTユニットに積み替え、実際の集配作業における挙動データを収集した。
また、ウイング車からの積み降ろしに使用するフォークリフトに各種センサーを装着、荷重情報や挙動データを取得。ドライバーの協力を得て、ウエアラブル端末を装着してもらい、行動センシングによる作業識別モデルの構築に努めた。
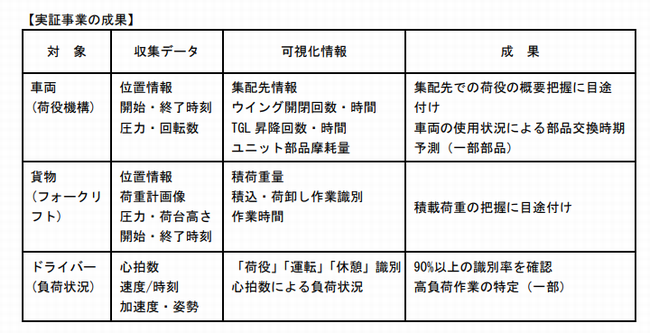
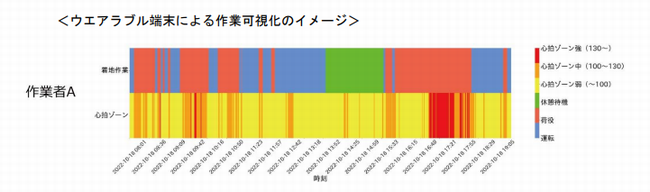
荷役作業の実態把握は将来の商用車の自動運転・自動荷役の実現に向けた類型化・標準化推進でも必要不可欠のため、今回の実証はトラックとフォークリフト、ドライバーにそれぞれ装着した各種デバイスを通じて取得したデータを収集・分析し、ドライバーの負荷状況や貨物の積載状況を可視化、運行品質を改善できるかどうかを検証した。
従来、ドライバーの自主申告に依存していた荷役作業の可視化を通じて、集配先と協同での作業環境改善やルート変更などのドライバー負荷軽減、過積載の防止、車両の突発故障の未然防止による円滑な集配業務の実現などの効果が見込めると想定。今後積荷情報とのデータ連携が進めば、着荷主側での作業効率改善やマッチングによる積載効率の向上につながるとみている。
3社は今回の実証で得られた知見を活用し、可視化の機能をさらに深めるとともにトラックデータとの連携を進め、早期の実用化を図る。
(藤原秀行)※いずれもプレスリリースより引用