カメラで対象を画像認識、精密な作業実現
チトセロボティクスは8月22日、ロボットアーム搭載型の自動誘導搬送車(AGV)や自動自律搬送ロボット(AMR)にロボット制御ソフトウェア「クルーボ」を実装し、動作の高度な器用さと精密性を実現したと発表した。
クルーボは同社が開発した産業用ロボット制御ソフトウェア。カメラを活用した画像認識により、ロボットアームの自律的な動作を実現している。
環境変動のある現場でも、カメラを通じて作業対象を正確に認識し、高度な自動化が可能。組立作業などの精密な動作を必要とするタスクでも高い品質と効率を維持できるとみている。
同社が公開している事例によると、最初の動作ではランダムに配置されたワーク(LED部品)をカメラ画像から認識して、エンドエフェクタでピック。パーツの位置に対してビジュアルフィードバック制御することで、モバイルマニピュレータの停止位置に依らず、精確なピッキングを可能にしている。
次に、ピックしたワークの向きを、モバイルマニピュレータに搭載されたカメラで認識して、整列させるために持ち替えている。最後に、ワークであるLED部品の足をカメラで認識しながら、ブレッドボード穴まで誘導制御することで、挿入している。
LED部品の足は0.5mm、ブレッドボードの穴径は0.7mmで、モバイルマニピュレータによるキャリブレーションレスの高精度制御を達成していると強調している。

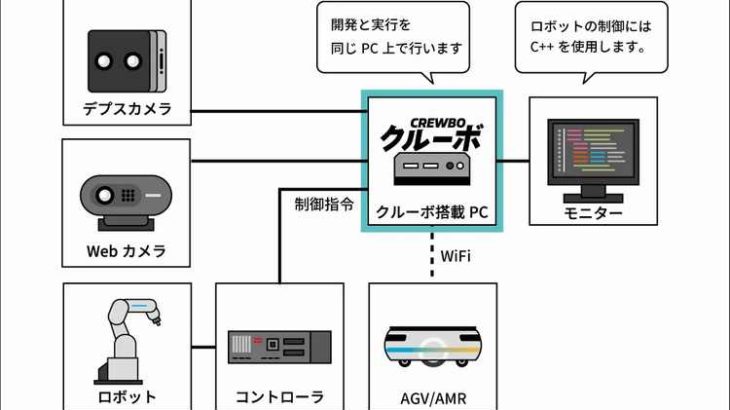
システム構成図(チトセロボティクス提供)
(藤原秀行)