NEDOなど、グローバルで情報共有や技術開発、社会実装加速見込む
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)とSUBARU、日本無線、ACSLは10月6日、4者が連携して提案してきた、ドローンなど無人航空機の衝突回避に関する運航手順を含めた国際規格の改定版が10月2日、国際標準化機構(ISO)で「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム 第3部・運航手順)として正式に採択・発行されたと発表した。
NEDOの「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」の成果を基に、2021年から規格改定の調整を進めていた。

4者は今後、ドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを本規格に基づいて行うことで、グローバルでの情報共有や技術開発、社会実装の加速を見込む。
さらに、衝突回避手順の技術運用の標準化を受け、回避に必要な手段として、他の航空機を探知し回避するシステムや、試験方法の標準化が進められ、さらなる空の安全確保が期待できるとみている。
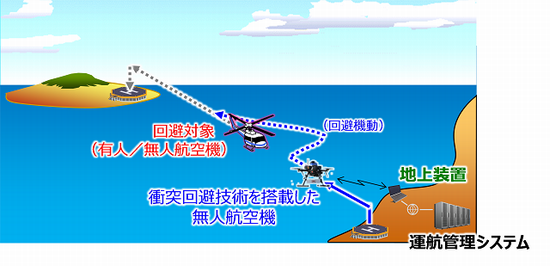
開発した衝突回避技術のイメージ
ドローンなど無人航空機の衝突回避に関する技術開発は、既に各国で行われているが、衝突回避の手順や手段は国際的にバラバラで特定のメーカーの機体同士や限定されたサービスの中だけでしか回避できず、空の安全を十分確保できるかどうか不安が解消されない状況にあった。このため、NEDOなど4者が国際的なルールとして規格を浸透させようと取り組んできた。
2019年11月に初版が発行された「ISO21384-3」は、無人航空機の運航手順を規格化したが、他の航空機や無人航空機同士の衝突回避手順は盛り込まれていなかった。今回の改定で、衝突回避のCONOPS(Concept of Operations:運用構想)を新たな章として追加し、「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」および「元ルートでの飛行」の6ステップから成る基本的な手順を定めた。
今後、無人航空機はこの6ステップに従い、統一された回避行動を取ることが国際規格になる。
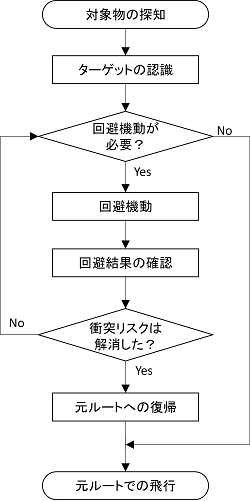
衝突回避の基本手順(いずれもプレスリリースより引用)
(藤原秀行)