


ダイナミックマッププラットフォームや豊田自動織機など、港湾や物流センターの利用実現も目指す
高精度3次元地図データ(HDマップ)を扱っているダイナミックマッププラットフォームと豊田自動織機、中部国際空港、中部スカイサポートの4社は1月22日、同空港の制限区域内で、空港内情報集約基盤「VIPS」(Various Information Port System)の開発を目的とした自動運転トーイングトラクター(貨物牽引車)の走行実証を実施したと発表した。
自動運転はレベル3(一定の条件下でシステムが運転の責任を担う)で行った。

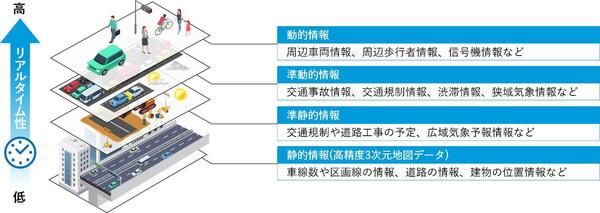
ダイナミックマッププラットフォームは、国土交通省の中小企業イノベーション創出推進事業(SBIR)を通じてVIPSの開発を進めている。VIPSは空港内の様々なダイナミックマップ情報(工事や故障車の停車などによる通行不可エリアといった静的情報と、航空機や車両の位置などの動的情報)を集約、活用できるようにすることを想定している。
ダイナミックマップ情報は制限区域内のAI搭載カメラやセンサーが自動的に収集し、VIPSに登録する。情報は自動運転車両が走行するエリアに応じて必要なもののみ車両システムに配信。車両システムに搭載している「高精度3次元地図データ」と統合し、静的情報と動的情報を重ね合わせた「ダイナミックマップ」として、自動運転車両の正確な走行に活用することを計画している。
4社はこの仕組みは空港に加え、港湾や物流センターなど他の施設でも利用可能と指摘。様々なエリアにおける「レベル4」(一定の条件下で無人となる)自動運転の実現に貢献できると見込む。

空港内の「VIPS」システムイメージ
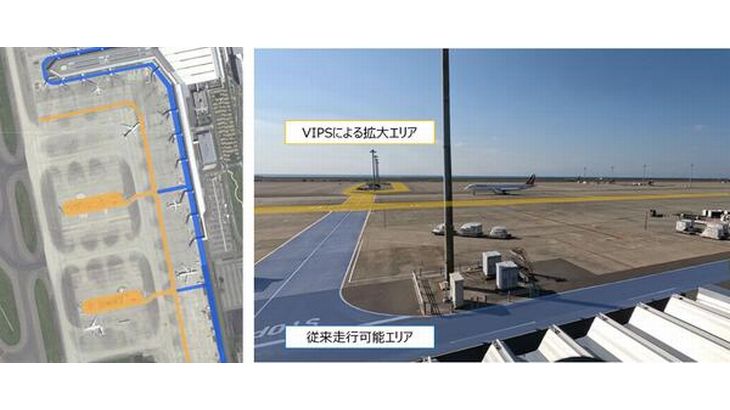
今回の実証ルートは航空機の走行経路を横断する車両走行路のサービスレーンを含んでいる。サービスレーンは車載のカメラやセンサーのみで航空機の状況を確認することが難しく、レベル4自動運転の実装に課題を抱えていた。
VIPSを活用することで航空機の位置をリアルタイムで認識できるようになり、システムによる走行可否判断が可能と想定。これまでレベル4自動運転が可能なエリアはターミナル周辺に限られていたが、VIPSを使えばターミナルから離れた駐機場(沖止めエリア)まで拡大できるとみている。

VIPSによる空港内の自動運転可能エリアの変化。左図は国土地理院撮影の空中写真(2010年撮影)を加工して作成
サービスレーンは人の目で判断して走行する場合でも、人為的ミスによるインシデントが発生しやすいため、VIPSを活用し多様な情報を集約したダイナミックマップによる自動運転を導入することで、システムの正確な判断による走行を可能にし、安全性の向上にもつなげられると期待している。
2025年2月には実証の前段として、高精度3次元地図データのみを使用した自動運転実証を同空港で実施していた。今回の走行実証はこの結果を踏まえ、VIPSと高精度3次元地図データを掛け合わせたダイナミックマップの有効性を検証した。
今後ダイナミックマッププラットフォームはVIPSを用いたダイナミックマップの実用化とサービスレーンを含むエリアのレベル4自動運転の実現を目指す。並行して、実証の結果を基に同空港以外のグローバルな空港をはじめ、港湾や物流センターなど多様な施設でVIPSの導入を推進する。
<走行実証概要>
期間:2026年1月19~21日
対象エリア:中部国際空港 制限区域内(第1ターミナル~第2ターミナル周辺/サービスレーンを含む)
実証内容:自動運転車両走行により、VIPSと高精度3次元地図データを掛け合わせたダイナミックマップの有効性を検証
自動運転レベル:レベル3(動的情報が確認できるタブレットを使用し、有人の下で走行)
<使用機材>

・トーイングトラクター
| 車両 | 豊田自動織機 自動運転トーイングトラクター (3ATE25) |
| 速度(最大) | 15km/h(自動運転時) 25km/h(有人運転時) |
| けん引重量 (最大) |
13t(自動運転時) |
| 制御技術 | 路面パターンマッチング(RSPM®)※1 GNSS(高精度衛星測位)、 3D LiDAR※2、磁気誘導※3 |
※1 車両に搭載したカメラで撮影した路面画像と事前に作成した路面画像マップデータをマッチングすることで、車両の位置・姿勢情報を取得する技術。RSPM(Road Surface Pattern Matching)は登録商標
※2 対象物にレーザー光を照射し、その反射光を測定することで対象物までの距離を正確に測定できるセンサーで、車両周辺状況の把握に使用
※3 路面に敷設された磁気マーカの位置を車両に搭載された磁気センサーで検知し車両位置を取得する技術
(藤原秀行)※いずれもプレスリリースより引用






