動作に応じて姿勢固定、多様な形状の物に対応
新エネルギー・産業技術総合開発機構(NEDO)とダブル技研、都立産業技術高等専門学校は12月5日、さまざまな形状の物をつかめる3本指ロボットハンドを共同開発したと発表した。動作に応じてハンドの姿勢を固定できる「可変剛性機構」を備えており、物流の自動化促進に貢献できるとみている。
ダブル技研は同機構を採用したロボットハンド「D-Hand Type R」の受注生産を同日開始した。併せて、12月18~21日に東京・有明の東京ビッグサイトで開かれる「2019国際ロボット展示」に出展する。

新たなロボットハンドは、1つの駆動装置を用いて3本の指がそれぞれ物の形状に添うため、対象物が複雑な形状でも対応が可能。同機構で各指の姿勢を任意の位置で固定(ロック)し、ハンドリング位置を決める精度を高めている。
NEDOは「従来は把持する物に応じてロボットハンドを交換していた生産ラインや、多品種を扱う物流倉庫などにおけるピッキング作業の自動化、ロボットハンド導入のコストの低減への貢献が期待できる」と強調している。

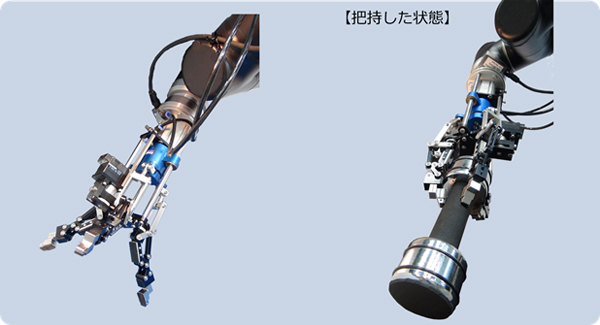
ロボットハンド「D-Hand Type R」。右側は把持した状態(NEDOなどのプレスリリースより引用)※クリックで拡大
(藤原秀行)