タブレット画面の映像から商品指示すれば可能に、複数台の同時並列操作も
NECは10月1日、物品をピッキングして指定のトレイへ運ぶ「ピック&プレイス作業」へのロボット導入のハードルを下げ、作業の生産性を大幅に向上できる技術を開発したと発表した。
操作する人が運びたい物品をタブレット画面の映像から指定すれば、ロボットが物品をあらかじめ指定されたトレイにピック&プレイスする。従来、ロボットにピックアップする物品を認識させる「ティーチング」に荷物1個当たり数十分~数時間を要していた物品情報の事前登録を省略することが可能。
ロボットアームの動きはNEC独自のAI「目標指向タスクプランニング」と組み合わせることで、ロボット自身が自動で準備するため、ロボット操作の非熟練者がすぐにロボットの利用を開始できるという。
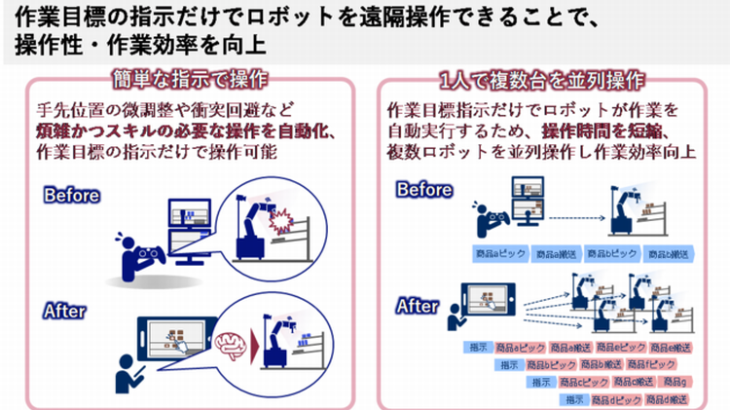
旧来の遠隔操作ロボットはカメラ映像を見ながらゲームコントローラーなどを使いロボットの手先を操縦するため、手先位置の微調整や衝突回避など操作者にスキルが求められた。さらに、操縦者が1台のロボット操作にかかりきりにならざるを得ないため、作業効率に限界があった。
人の介在が必要なのはロボットに作業指示を与える数秒間だけになるため、操作者1人が複数台のロボットを同時並列操作できるようになり、作業効率が大幅に向上すると期待している。
同社は「現場作業のリモートワーク化を促進し、時間や空間の制約を超えたフレキシブルな働き方が広まっていく」とみている。
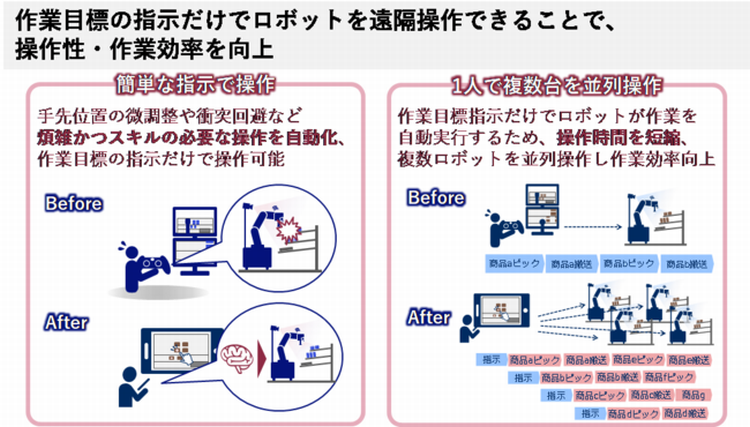
新技術の概要(NEC提供)
(藤原秀行)
動画はコチラから(NECウェブサイト)