阪大発スタートアップのThinker、ばら積みピッキングも円滑に可能と説明
大阪大学発のスタートアップでロボット開発を手掛けるThinker(シンカー、大阪市)は11月20日、新たな高性能の次世代型ロボットハンド「Think Hand F」のα版を独自に開発したと発表した。
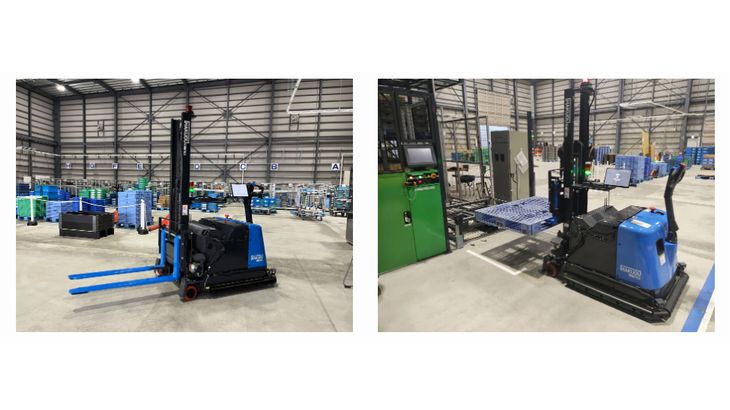
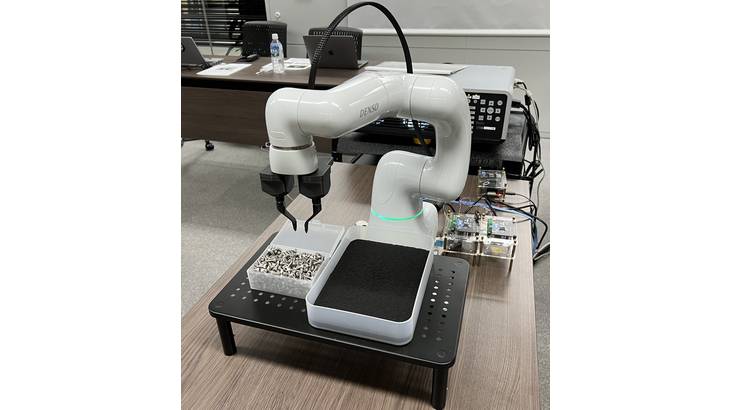
対象物までの距離と角度を非接触で計測できる「近接覚センサー TK01」を活用し、小さなねじなども正確につかめるのが特徴。同社はこれまで工場や物流施設で、ロボットでは難しいとされてきたばら積みのピッキングもスムーズに行えるようになり、現場の自動化・省人化促進につながると想定している。

東京都内で同日記者会見した、パナソニックグループの社内ベンチャーATOUNでアシストスーツ開発にも携わってきたThinkerの藤本弘道CEO(最高経営責任者)は「現場の環境に応じて臨機応変にピックアップすることが可能になるため、ものづくりの現場を大きく変えられる」と自信をのぞかせた。
センサー単体では既に他社製品で活用されている事例があるという。Thinkerは2024年度中に量産体制を整えた上で、25年度にロボットハンドを発売し、26年度にセンサーとハンドで売上高10億円を目指す。製造現場に加え、物流現場にも活用が広がることが期待される。
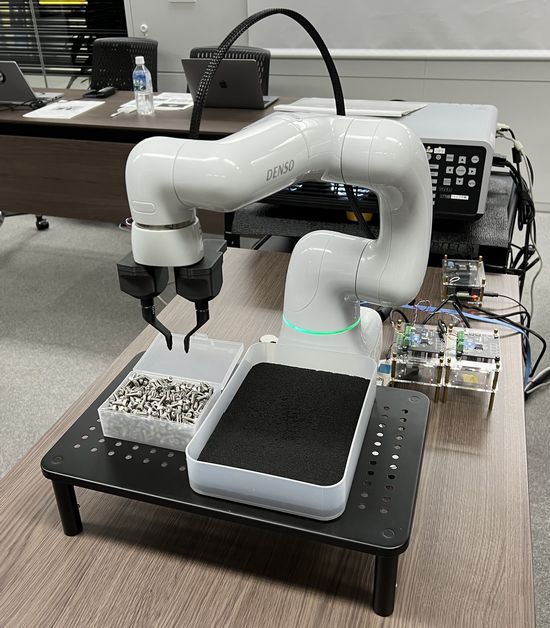
「Think Hand F」のα版

会見する藤本CEO
近接覚センサーはカメラを使わず、赤外線とAIを組み合わせて、対象の物の位置や大きさ、形状、姿勢、距離を触れなくても正確に把握する。透明な物や鏡のように光が反射する物、柔らかい野菜といった、これまでの産業用ロボットでは対応が困難だった物でも取り扱えるようになるという。
また、対象物とロボットハンドの位置のずれを埋めるため、ばねを活用して力を吸収する「フローティング機構」を採用し、ロボットハンドの指の部分が対象物に触れて作業が停止したり故障したりする事態を回避する。指の部分が物をつかみ損ねても瞬時に検知し、素早く再度トライできる。指の部分は、対象の物の輪郭に沿ってつかいみやすい姿勢に自動で調整、優しくピッキングする。
さらに、事前に動作をロボットに教え込む「ティーチング」の手間も減らせるため、製造現場への導入がスムーズになると見込む。
11月29日から12月2日まで東京・有明の東京ビッグサイトで開催される「2023 国際ロボット展(iREX2023)」でお披露目する。

近接覚センサー
会見するThinkerの中野基輝CTO(最高技術責任者)
(川本真希、藤原秀行)