



NEDO事業に採択、実証実験を24年度中に実施予定
ヤマト運輸とNEXT Logistics Japan(NLJ)、自動運転など向けに高精度の3次元地図データを提供しているダイナミックマッププラットフォーム、BIPROGY(ビプロジー、旧日本ユニシス)の4社は7月24日、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)公募「産業DXのためのデジタルインフラ整備事業/デジタルライフラインの先行実装に資する基盤に関する研究開発」における「自動運転支援道」事業の実施予定先として採択されたと発表した。
4社はコンソーシアムを結成し、自動運転を支援するデータ連携システムを開発、業務の効率化やリソースの最適化を目指す。

同事業は特定条件下での完全自動運転を実現する「レベル4」自動運転トラックによる新東名高速道路(駿河湾沼津~浜松SA間)走行の実現に向けた実証実験を2024年度中に行う予定。
(4社提供)
同事業は自動運転を支援するデータ連携システムを確立することで、各事業者の業務に共通する機能に必要なデータセットを提供、複数の企業や業種間でデータ連携を可能にするデジタル基盤の構築を図る。
構築する基盤は物流分野にとどまらず、多様なモビリティエリアで広く活用され得るものにする計画。
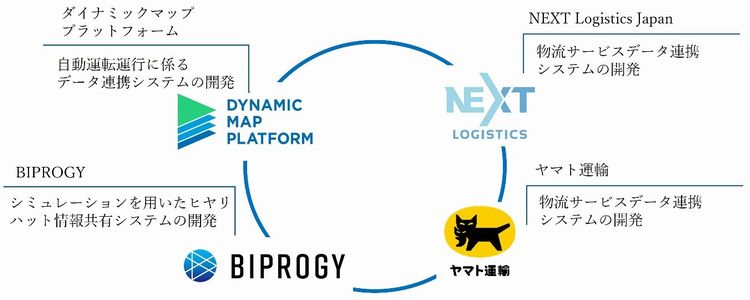
コンソーシアムの4社の役割
・ダイナミックマッププラットフォーム:自動運転運行に関するデータ連携システムの開発
「自動運転支援道」の整備事業に関わる事業者全体と連携し、自動運転運行に必要な各種データの処理・接続ができるようにするための“データ流通システム”を開発する。また、既存の交通情報提供者や路側インフラ、車両等から提供される各種情報とダイナミックマッププラットフォームが有する3次元地図データを統合した情報を配信し、自動運転車両の安全走行を支援するシステム(“車両情報連携システム”)を開発する。
・BIPROGY:シミュレーションを用いたヒヤリハット情報共有システムの開発
車両や外部システムからヒヤリハット情報を取得し、シミュレーション化することで自動運転システムの開発に活用できるシナリオカタログを整備する。また、走行環境モデルやシミュレーション生成するための環境を開発する。
・NEXT Logistics Japan、ヤマト運輸:物流サービスデータ連携システムの開発
荷主の輸送需要を基に作成された運送事業者のダイヤ計画やルート計画のデータ連携が可能となる共同輸送システムを開発する。当該システムとデータ流通システムや車両情報連携システム間の連携を実証することで、物流サービスにおける自動運転導入およびデータ連携による効率化の実証などを行う。
(藤原秀行)






