


オカムラとモーションリブが共同研究、事業化に必要と判断
オカムラは11月27日、自律・遠隔操作ハイブリッド型ロボットによる物流自動化ソリューション「PROGRESS ONE(プログレスワン)」の事業化に向けた取り組みの一環として実施した、物流ピッキングロボットを遠隔操作する際に触れた物体からどの程度の力を受けているかを再現する「力覚フィードバック効果」の調査研究結果を公表した。
同研究は「サイズや出力が異なるロボットの遠隔操作時の力覚フィードバック効果の先導調査研究」として、慶応義塾大学発のスタートアップで手触りや衝撃といった触覚をデジタルで再現する独自の「ハプティクス(触覚)」技術開発を手掛けるモーションリブ(川崎市)と共同で行った。

遠隔操作ロボットシステムで、オペレーターが遠隔地から物流現場にあるロボットでピッキング作業を行う場合、操作画面による視覚的な判断だけでは、遠隔での把持(しっかりものをつかむ)操作が困難であることが課題となっていた。
オカムラは「プログレスワン」の事業化を進めるに当たり、視覚に加え、力覚フィードバックで操作性を高める開発・研究が必要と判断していた。
本研究は、ピッキングなどの物流施設内作業を想定した遠隔操作ロボットシステムで、オペレーターが遠隔地からディスプレイを見ながら作業を行う際に、複雑な動作になるほどロボットが物体と接触した時の引っ張られる・押されるなどの力覚情報を人に知覚させる力覚フィードバックの重要性を実証するとともに課題を検討。
実験結果から、力覚フィードバックが遠隔での把持操作や緩衝材の押し込みを効率的に行うために必要不可欠な機能であること、オペレーションの熟練者と初心者ではそれぞれ必要とする補助機能が異なることなどが明らかになったという。

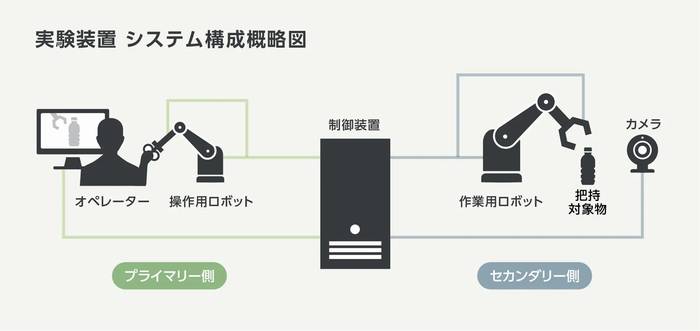
遠隔操作ロボット実験装置
この研究は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)が2022年度に公募したプロジェクト「ロボットによる社会変革推進に向けたロボット・AI部事業の周辺技術・関連課題に係る先導調査研究」として採択された。
研究ではまず、同じ型式のロボット2台を接続してオペレーター(プライマリー側)と作業用ロボット(セカンダリー側)で出力差がある遠隔操作環境を簡易的に構築。物流現場で想定される遠隔操作作業(デモ作業)を通して、力覚フィードバックの有無が遠隔操作に与える影響を定量的・定性的に確認した。
力覚フィードバックには、アクチュエータの力加減を自在に制御することができる「リアルハプティクス」と呼ぶ技術を搭載したシステムを活用。物流現場のピッキングや緩衝材を詰める作業で、適切な変位や力の増幅率が、遠隔操作に与える効果を確認した。
また、オペレーターが操作を行う際に、リアルな操作感を再現するための変位や力について課題を特定した。
次に、プライマリー側とセカンダリー側で大きさの違うロボットを用いて、同じ型式での実験で効果が見られた倍率の組み合わせを検証。変位や力についての課題解決として、オペレーターの補助機能となるディスプレイに表示するユーザーインターフェース(UI)の有効性を確認した。
(藤原秀行)※いずれもオカムラ提供






