

フィジカルAI活用、「ライフライン・ロジ」高度化達成
Mujin傘下でエンジニアリングを手掛けるMujin Japanは6月4日、東京電力パワーグリッドグループで電力設備の物流を手掛ける東電物流が中央支社(東京都大田区東海)で、NX商事の協力を得て、フィジカルAIを活用したロボットケースピッキング自動化ソリューション「MujinRCP」を稼働させたと発表した。
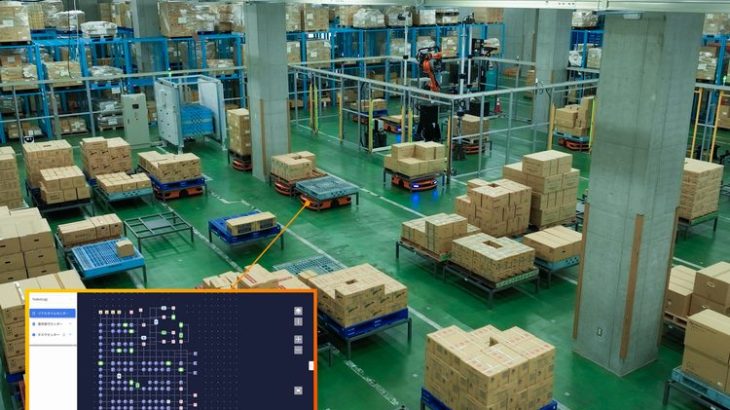
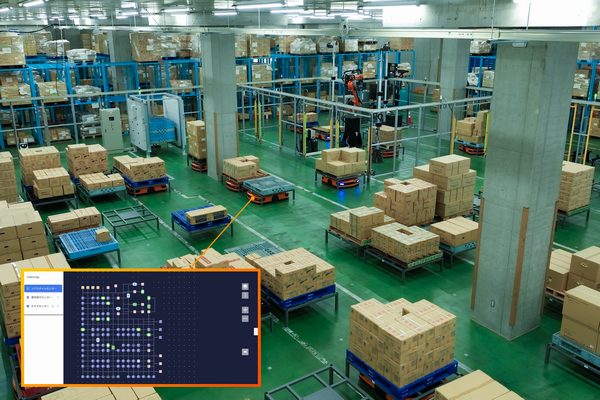
同システムはMujinの統合型オートメーションプラットフォーム「MujinOS」がアームロボットと17台のAGVを制御。電力設備工事に使う多品種資機材のケースピッキング作業を自動化した。

Mujin Japanは「電力インフラを支える物流は、誤出荷や遅延が社会インフラ維持に影響する重要な領域であり、今回の取り組みは、フィジカルAIで『ライフライン・ロジスティクス』を高度化する先進事例」と意義を強調している。
Mujin OSは混載積み付け計算やAGVによる順立て供給、3Dビジョン認識、ロボット動作計画、積み付け実行までを包括的に制御し、ケースピッキングの一連作業を自動化するのが特徴。
電力インフラの維持・保守に用いる資機材は品種、形状、重量が多岐にわたり、出荷オーダーごとに正確にピッキングする必要がある。従来の有人作業は重量物を扱うことなどから負荷が大きかった。
また、取扱資材の多さに加え、同一品目でもメーカーによって梱包サイズや荷姿が異なり、誤出荷を防止するため専門知識を有する担当を配置していたため、担当が不在となった場合の業務品質低下リスクがあった。
社会インフラを支える物流として高い出荷精度が求められるため、入念な検品作業が必要で手間を要していた。
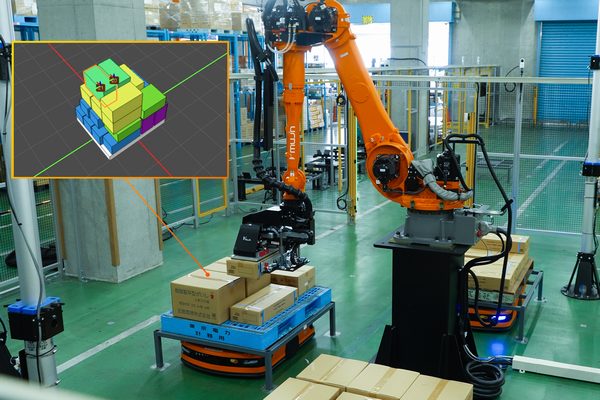
MujinRCPはサイズ・形状・重量が異なる多品種ケースを3Dビジョンで認識し、独自のフィジカルAI技術でロボットが自律的にパレタイズを実行する。これまで自動化が難しく
人手に依存しやすかった多品種小口のピッキング・積み付け作業を、安定的に自動化できると見込む。
また、従来、多品種ケースピッキングの自動化には、自動倉庫や専用設備など大規模な固定設備が必要だった。MujinRCPはアームロボットとAGV、パレットストッカーをMujinOSで連携させ、パレット保管、積み付け計算、順立て供給、ピッキングを一体で制御する。
既存の倉庫や基幹システム(WMS)を活かしながら、限られたスペースにも導入できるようにしている。
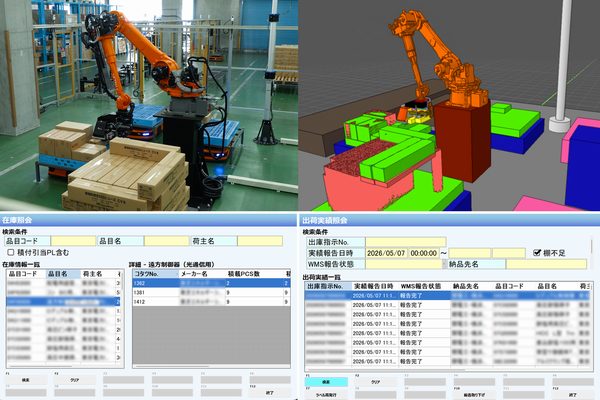
さらに、デジタルツイン上で設備の稼働状況を可視化し、作業進捗、在庫情報、出荷実績などを一元管理する。作業者の確認や目視検品に依存していた工程をシステム上で管理することで、検品作業や誤出荷リスクを削減するとともに、作業実績や設備稼働データを蓄積して現場のボトルネック把握や継続的な運用改善につなげられると見込む。
ケース品取扱量比で90%自動化(中央支社)したほか、ピッキング作業人員をそれまでの4人から1人に抑えた。対象工程の出荷検品作業はゼロになり、「人車分離」と自動化で労災リスクや身体的負担の低減にもつながっているという。
(藤原秀行)※いずれもMujin提供






