



気象データなど踏まえ最適ルートの自動算出目指す
長い滑走路を使わず旅客や荷物を運べる「空飛ぶクルマ」の関連事業を手掛けるエアモビリティは12月14日、三重県鳥羽市で空飛ぶクルマのナビゲーションシステム「AirNavi」のプロトタイプをドローンに搭載した飛行の実証実験を同日行ったと発表した。
空飛ぶクルマのナビゲーションシステムを実用化すれば日本初となる。


実験は三重県の「クリ“ミエ”イティブ実証サポート事業」に基づき実施。AirNaviは利用者が目的地を入力すれば、気象データや空飛ぶクルマのバーティポート(離着陸場)情報など諸条件を鑑みて最適な飛行ルートを算出することを想定している。
実験では飛行ルートデータをドローンのコントローラーにアップロードし、ドローンが自動で安全に目的地まで到着することを検証した。

海上から上空60m、約2.7km先の目的地までドローンを飛行
今後は、リアルタイムでの気象情報の変化によるルート変更、衝突回避や運航管理システムとの連携など、空飛ぶクルマの実用化に向けた改良を重ね、2022年以降に空飛ぶクルマの無人・有人飛行を実現させ、25年の大阪・関西万博で実際に観客の輸送サービスを行い、全世界にアピールすることを目指す。
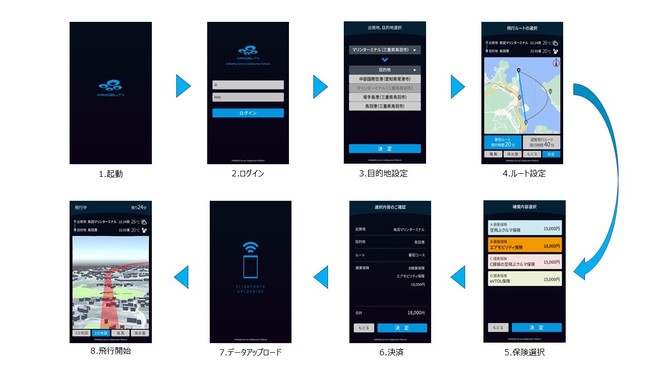
空のナビゲーションシステム「AirNavi」のルート設定イメージ
(画像はエアモビリティ提供)
(ロジビズ・オンライン編集部)






