高い専門知識がなくても導入・運用可能に
大阪大学発のスタートアップThinker(シンカー、大阪市)は1月30日、ロボットマニュピレーションの長年の課題とされてきたばら積みピッキングを実用化し、工場などの自動化を推進して省人化を実現する新型ロボット「Thinker Model A」を発売すると発表した。同日、受注を開始した。

製造現場では、検査や出荷準備などの際、人間がばら積みされた部品を一つずつ手に取って作業する工程が依然多く残っており、自動化・省人化実現の最大の壁の一つとなっている。

その背景には、ばら積みされた部品をロボットでつかむには、高額なカメラシステムや大型振動装置のパーツフィーダーを導入する必要がありコストが非常にかさむことと、産業用ロボットでばら積みピッキングを実施・運用する際にはカスタマイズを伴うことが多く、「ロボット自体のチョイス」「オプションパーツの互換性」「運用の制御」などの面で高い専門知識を要することがある。
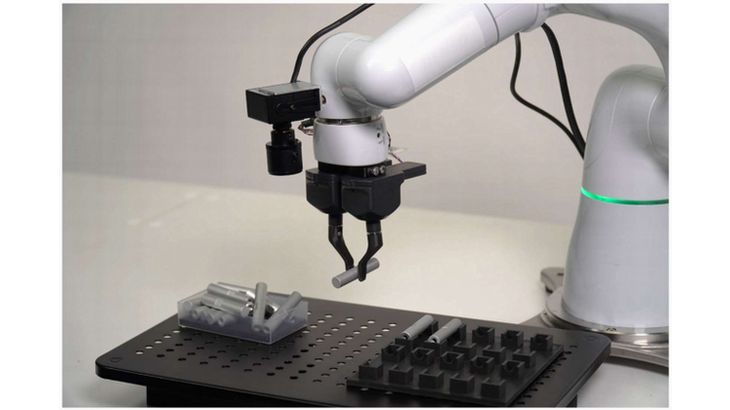
こうした課題に対して、「Thinker Model A」は、“まさぐって部品をつかむ”ことを可能にするロボットハンドの次世代センシング技術「近接覚センサー」に簡易2Dカメラシステムを組み合わせ、低コストでばら積みピッキングを実現。加えて、「近接覚センサー」の力を最大化するオリジナルのロボットハンド「Think Hand F」は独自のエッジAIを使い、高い専門知識がなくても導入・運用ができるようにした。
同日、オンラインで会見したThinkerの藤本弘道CEO(最高経営責任者)は、今回の新型ロボットの事業について、今後3年で売上高を10億円規模まで高めたいとの意向を示した。

Thinker Model A

ロボットハンド Think Hand F

近接覚センサー(いずれもThinker提供)
(藤原秀行)