
事故やヒヤリハット発生時の迅速な原因特定と再発防止可能に
NEDO(新エネルギー・産業技術総合開発機構)は5月8日、委託事業「産業DXのためのデジタルインフラ整備事業」(2022~24年度)の一環で、立命館大学が複数のロボットを活用し、複雑なシステム連携を行う際のデータ連携基盤の運用に関する実証を本格的に始めると発表した。
NEDOと立命館大は実証を通じ、配送ロボットやドローンなどの自律移動ロボットに必要な種々のシステムのように、運用者の異なる複数システムが高度に連携する仕組み(System of Systems、SoS)を形成した際に生じる課題を解決し、人間とロボットが共生し、急速な変化に適応する自律進化を促す社会「Society5.0」の実現を目指す。

両者は具体的な課題として、複数のロボットなどを同時に運用した場合、事故の予見や迅速な原因特定が困難なことなどを想定。立命館大はキャンパス内で実際に配送ロボットなどを運用することで、SoS運用時のデータの収集・管理・共有が可能となるデータ連携基盤の構築を目指すとともに、従来の一律で詳細な法規制とは異なる新たなガバナンス(アジャイル・ガバナンス)の在り方についても検討する。
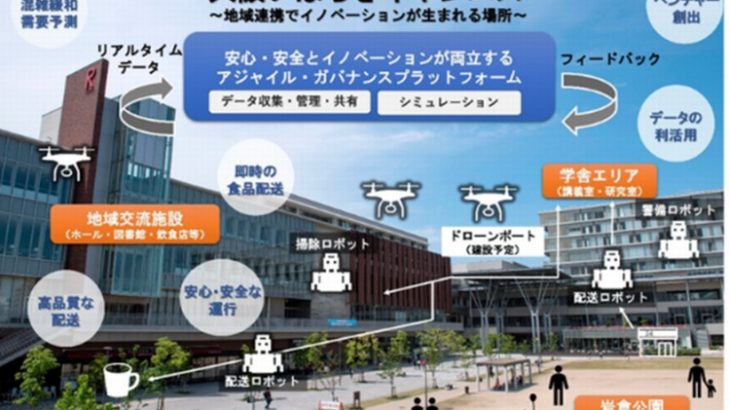
立命館大は自律移動ロボットの運用データとガバナンスに関するデータの収集・管理・共有のためのデータ連携基盤「アジャイル・ガバナンスプラットホーム」の研究開発を続けている。
新たにプラットホームを構築することで、運行中の配送ロボットやドローンなどの自律移動ロボットがセンサーを通じて取得する情報のほか、建物側に取り付ける監視センサー(カメラ、LiDARなど)の情報も統合管理することで、事故やヒヤリハット発生時に、短時間で原因特定と類似災害防止のための情報共有を実現できるようにする。
立命館大は昨年9月、大阪府茨木市の「大阪いばらきキャンパス」内のコーヒーショップと連携した配送ロボットをはじめ、自律移動ロボットの運行とプラットホームの運用を繰り返してきた。
5月19日にキャンパス内で開催するイベント「いばらき×立命館DAY」を手始めに、キャンパス内の大学生協ショップと連携した配送ロボットの運用に加えて清掃・警備ロボットの取り扱いも始め、複雑なシステム連携時にプラットホームがうまく運用できるかどうかの実証を本格的にスタートさせる予定。

実証のイメージ(プレスリリースより引用)
(藤原秀行)






