国内5拠点で運用実証へ
NIPPON EXPRESSホールディングス(NXHD)とNECは9月4日、共同で開発に取り組んでいる、フォークリフトやロボットアームなどを活用した遠隔搬送ソリューション「テレロボフォーク」、「テレロボハンドラー」に関し、2025年の提供開始を目指すと発表した。

両社はその一環として、今年1月にNXグループの倉庫で、フォークリフトの自律遠隔ソリューション「テレロボフォーク」の実証検証を開始した。今後、NXグループの国内5拠点を対象に運用検証を展開する計画。
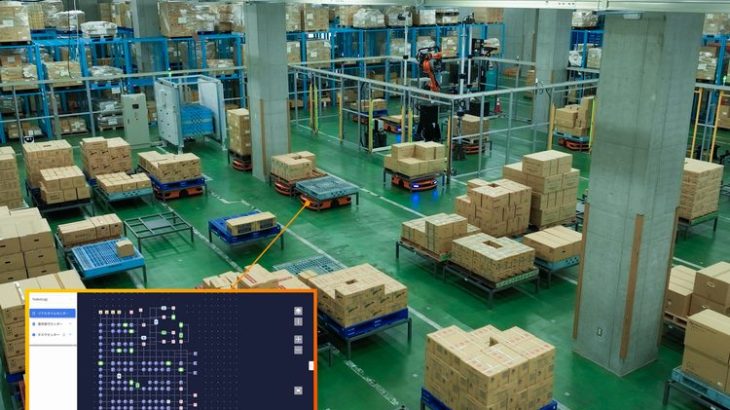
「テレロボフォーク」は、既存のフォークリフトにレバー、ハンドル、ペダルを制御するアクチュエータと、カメラや高精度センサーのLiDARなどを後付けすることで自律遠隔制御対応を実現するとともに自律、遠隔、搭乗の3つの操作モードを簡単に切り替えられるようにする。
倉庫内の映像データを基にシミュレーションを実施し、輸送ルートを自動設計する。自律制御時はフォークリフトに搭載したカメラやLiDARなどでセンシングした周辺の状況を踏まえ、リアルタイムでルートを見直す。
搬送ルート上の障害物や人などへの衝突リスクを把握し、フォークリフトの速度を制限速度内で自動調整する。全てのフォークリフトのカメラ映像やセンサー情報をクラウドに集約し分析、制御することで、フォークリフトを倉庫外からも管理・操作できるようにする。
遠隔からの作業指示によりロボットアームの動きを制御できる「テレロボハンドラー」も24年中にNXグループの倉庫で実証検証を開始することを予定している。
「テレロボハンドラー」は、ロボットアームを活用して複数のパレット、かご台車への仕分け、隙間ない積み付け・積み替えなどを、離れた場所から作業することを可能にする。
事前のプログラミングは不要で、積み付け・積み替え作業の途中でかご台車やパレットの位置や物品、仕分け方法が変わっても、GUI操作などの簡易な遠隔指示により短時間で認識し、迅速な作業の再開を実現する。設置の際は工事不要で、異なる作業場所へ簡単に移動させられる。

「テレロボフォーク」

「テレロボハンドラー」
ソリューションは「国際物流総合展2024」で紹介する。
(藤原秀行)※いずれも両社提供