

パレット一括認識技術を搭載、今秋発売へ
ハクオウロボティクスは2月19日、東京ロジファクトリーと連携し、1月27~28日に高性能パレット一括認識技術を備えた自動フォークリフト「AutoFork(オートフォーク)」による倉庫内の搬送効率化実験を、東京ロジファクトリーの川越センター(埼玉県川越市)で実施したと発表した。
今春以降にはAutoForkとエレベーターの連携実験も予定している。ハクオウロボティクスは今秋、AutoForkを発表する予定。


実証実験の様子
AutoForkは従来の自動フォークリフトが実現できなかった、人がトラックバースや荷物の仮置場に置いたパレットを一括で自動認識・取得できる機能を装備。倉庫内の仮置場とトラックバース間の効率的な自動搬送を可能とし、物流業界における課題を解決できると見込む。
川越センターの実証実験では、フォークリフトオペレーターによる倉庫内での長距離搬送作業が軽減し、倉庫内定位置でのピッキング作業に集中できる効果が実証できたという。
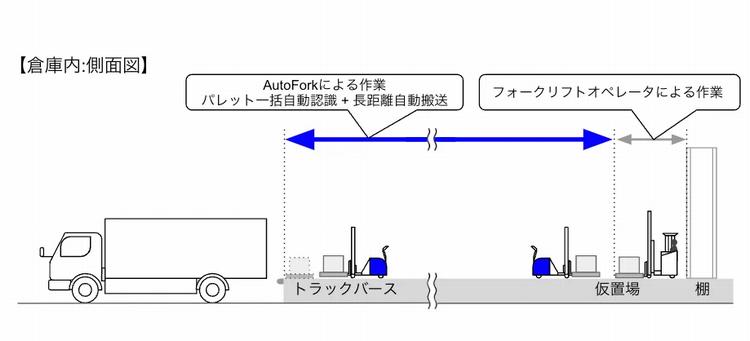
実証実験概略図
AutoForkの車体側面に取り付けたセンサーが、走行しながら近くにあるパレットの位置を把握し、最適なパレットへの進入角度と走行経路を生成、パレットを取得する。
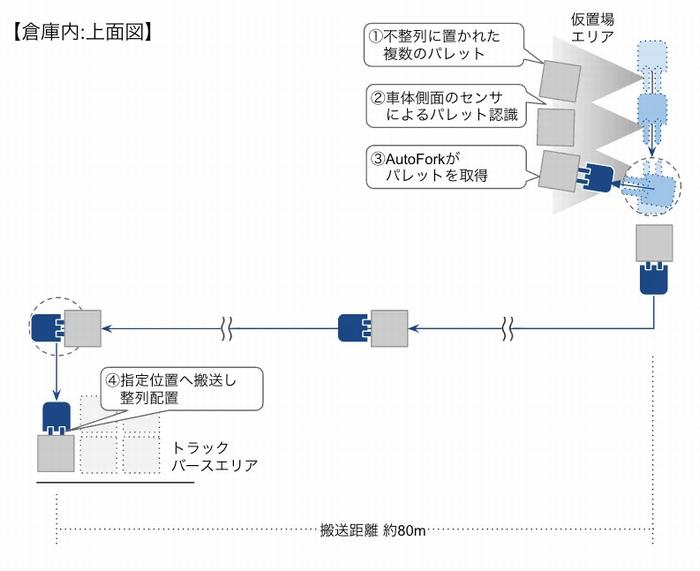
「AutoFork」認識技術の概略図
製品コンセプトとして、アプリケーションプラットフォームをソフトウェア開発事業者にも公開し、新たな機能を追加、多機能化を可能にする。
実験の成果は2月20~21日の「ロジスティクスソリューションフェア2024」で公開する予定。
(藤原秀行)※いずれもハクオウロボティクス提供






