支援システムを川崎汽船などと共同開発、受注開始
川崎重工業は5月20日、川崎汽船、川崎近海汽船の両社と共同で取り組んでいる「安全離着岸支援システム」の研究・開発に関し、実際の船を活用した実環境下の実証試験で、港湾内操船と離着岸操船の自動化に成功したと発表した。
川崎重工は同システムの受注活動を開始した。

実証で使った船
同システムの開発は、風などの外乱がある中で岸壁との平行な船体姿勢を保ちながら、真横に船を移動させ着岸させる操船の難易度が高いことが技術面の課題だった。
実証では川崎重工が開発した操船支援情報表示装置と操船支援制御装置を利用し、風や波のある条件下で、港湾進入から着岸(フェンダータッチ)まで、事前に設定した航路を自動追従航行し、入船(前進)および出船(後進)で自動着岸・離岸を実現した。
現在、港湾内での離着岸作業は、操船技術に精通し、船固有の操縦性能と係船設備の特性を熟知した乗組員が実施している。船舶の大型化による操船の高難易度化や船員人材不足に伴い、船舶操船・係船の省力化・省スキル化や安全管理の向上が強く求められている。
同システムの導入により、難易度の高い港湾内における操船・係船の作業効率と安全性が大幅に向上すると見込む。同システムは船種を問わず導入が可能という。
現在、日本海事協会(NK)のAiP認証(基本設計承認)を申請中。
実証に使用した船舶の仕様
全長:173.34m
全幅:26.6m
総トン数:13,950トン
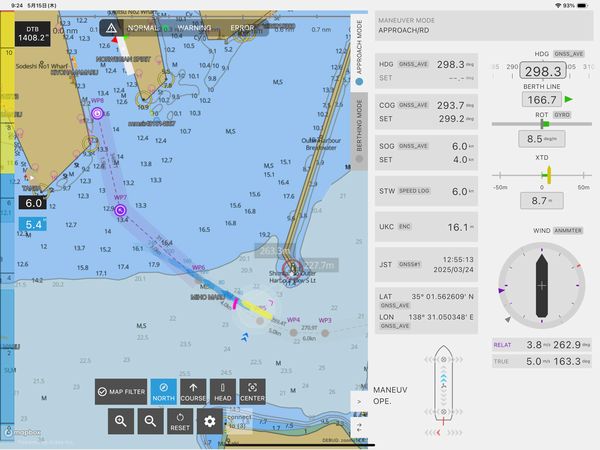
操船支援情報表示装置の表示画面(いずれもプレスリリースより引用)
(藤原秀行)