
AGV組み合わせコンテナ内に自動進入、1時間当たり最大600個処理可能と見込む
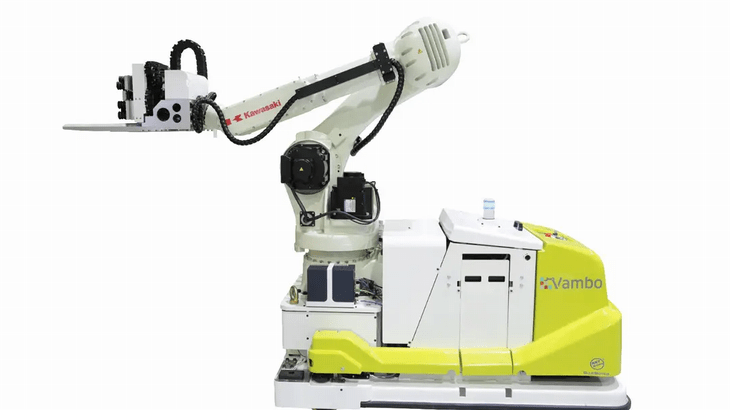
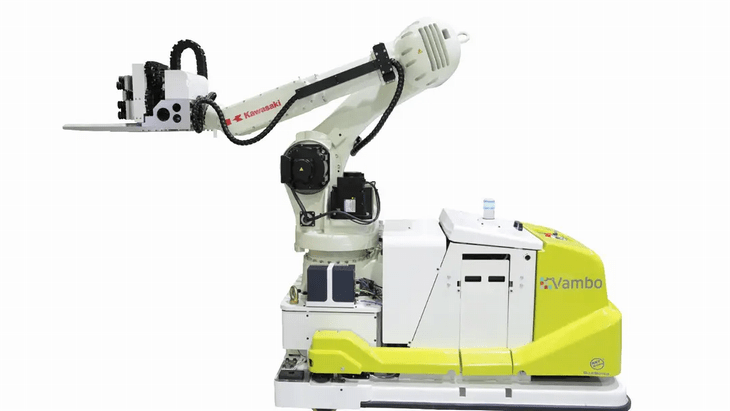
川崎重工業は6月8日、同社が開発した人間に代わって荷降ろしを行うデバンニングロボット「Vambo(バンボ)」を用いた実機検証を、日立物流の物流拠点「柏プラットフォームセンター」(千葉県柏市)で同日スタートすると発表した。
Vamboは川崎重工製の中型汎用ロボット「RS080N」に無人搬送車(AGV)を組み合わせたパッケージ商品。コンテナ内に自動で進入し、大小さまざまな重量物(ケース)が混載されている状態で荷降ろしを担う。
一般的なコンテナは1台当たり500~1000個のケースが積まれており、従来は人手で搬出していた。Vamboは新開発の3次元AIビジョンシステムとケース取り出しハンドを使うことで、人の手を借りずに1時間当たり最大600個の荷降ろしが可能という。
実機検証は、実際の現場でコンテナからの荷降ろしを行い、運転フローの操作性検証、サイクルタイムの実計測、安全装置の動作確認などを行う計画。Vamboを導入することで、荷役作業者の負荷を軽減するとともに、省人化に大きく寄与できると見込む。
■今回実機検証で使用する機種の主要諸元
| 商品名 | Vambo デバンニングロボット |
| 本体寸法 | 3,590mm (L) x 973mm (W) x 2,374mm (H) ※車載コンベア含まず |
| 最大走行速度 | 3.6km/時 |
| 最大処理能力 | 600個/時 |
| 対応ケース寸法 | 最大:650 mm (L) x 650mm (W) x 700mm (H) 最小:280mm (L) x 220mm (W) x 140mm (H) |
| 最大可搬質量 | 30 kg |
| ビジョンシステム | K-VStereo + 3次元カメラ |
(藤原秀行)※写真はプレスリリースより引用






