NEDOなどの研究開発成果を反映、広い用途で利用促進を期待
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)と日本無線、日本アビオニクス、ACSL、三菱総合研究所の5者は5月8日、NEDOの委託事業の成果を生かして共同で取り組んできた無人航空機の衝突回避システム標準化に関し、国際標準化機構(ISO)が4月25日付で同システムの国際規格「ISO15964 Detection and avoidance systems for uncrewed aircraft systems」を発行したと発表した。
同規格は「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム―第3部 運航手順)を具現化するための衝突回避システムに用いるセンサーなどの要件を規定している。
日本からはNEDOのプロジェクトの一環で実施した多様な実証実験の成果を取りまとめた技術報告書「ISO/TR 23267:Experiment results on test methods for detection and avoidance (DAA) systems for unmanned aircraft systems」を根拠として、有人ヘリコプターとの衝突回避などを想定したユースケースを盛り込んでいる。
5者は同規格の発行を受け、ドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを同規格に基づいて行うことで、グローバルな情報共有や技術開発、社会実装の加速が見込まれると指摘。
無人航空機と他の航空機、あるいは無人航空機同士の衝突回避システムが国際標準化したことで、技術開発の方向性を統一できる上、社会実装に向けた各国規制当局の法制化が加速し、空の安全確保のための施策が進み、より広範な用途でドローンの採用が広がると見込んでいる。

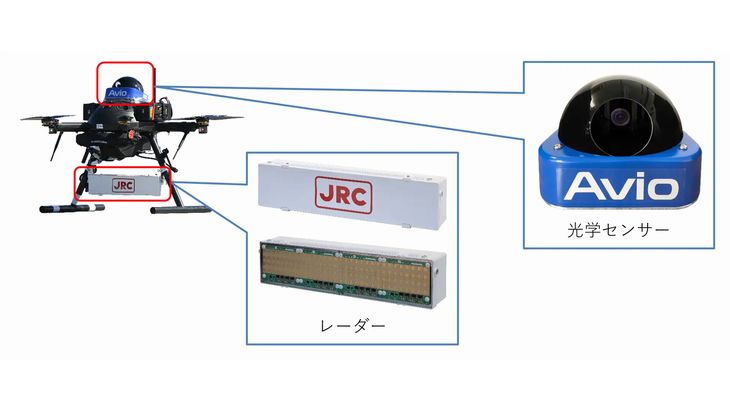
NEDOのプロジェクトで開発したセンサーの例
ドローンなど無人飛行機の普及には、ヘリコプターなどの有人航空機との衝突回避技術の確立が不可欠。そのため、NEDOのプロジェクトは2017年度に無人航空機の衝突回避技術の開発に着手。21年度まで実証実験を繰り返し、衝突回避技術に関する複数の研究開発成果を公開してきた。
この成果を基にした日本発の提案により、2023年10月、無人航空機の運航手順の規格「ISO 21384-3:2023 Unmanned aircraft systems Part 3:Operational procedures」(ISO 21384-3:2023)に衝突回避CONOPS (Concept of Operations、運用構想)を新たな章として追加。6ステップで構成する基本的な衝突回避手順を規定した。
24年4月15日には、技術報告書ISO/TR 23267も公開となった。

衝突回避6ステップで用いるハードウェアとソフトウェア
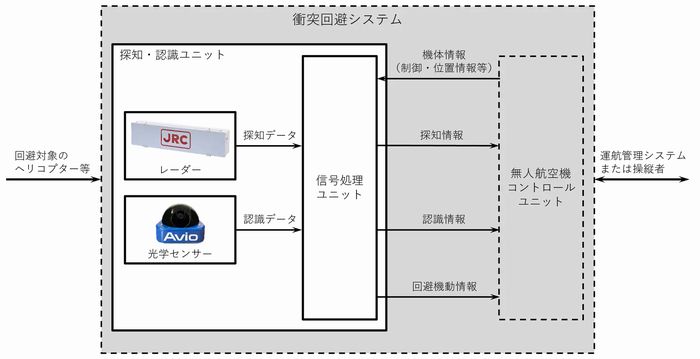
中長距離衝突回避システムの基本アーキテクチャ
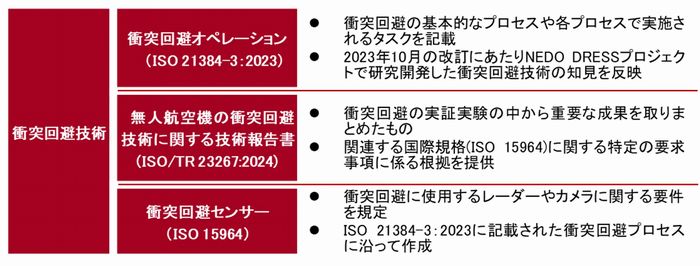
NEDOプロジェクト成果のISO規格への反映
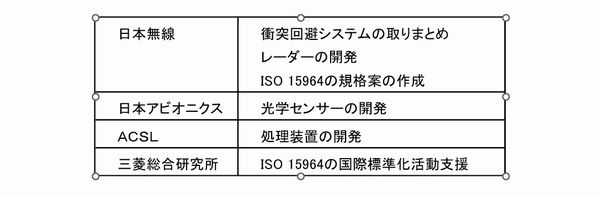
各社の役割分担
(藤原秀行)※いずれもプレスリリースより引用