芝浦工業大・新熊教授のマイクロモビリティ変革研究の一環
京都リサーチパーク(KRP)は11月22日、運営している産業研究やベンチャー企業支援のための施設「京都リサーチパーク」(KRP地区、京都市)で、自律走行型ロボットを使ったテイクアウトフード運搬実験を11月28日に実施すると発表した。
実験は芝浦工業大学の新熊亮一教授研究室と、新熊教授の設立した大学発ベンチャーのハイパーデジタルツインが担い、KRPは実験フィールドを提供する。
フードトラックが集積するエリア「ツドイStreet」に計10台のセンサーを設置し、空間特徴情報を取得。フードトラックの利用者が行き交う環境の下、自動走行型ロボットがテイクアウトフードを、約60~80m先のテラス席で待つ利用者に運搬する。
今回の実証実験で「ツドイStreet」利用者の安全性を確認できれば、12月以降には実証実験の第2段階へ進み、より実際の社会環境に近い形態で再実験を行う予定。
今回の実証実験は、情報通信研究機構(NICT)令和4年度(2022年度)委託研究「Beyond 5G研究開発促進事業(一般型)」の「多重自律マイクロモビリティのためのハイパーデジタルツイン基盤」の一環として実施する。
新熊教授の研究室は現実空間を仮想空間に再現する技術「デジタルツイン」を用いた自動運転の研究に取り組んでいる。屋外環境に複数設置された高性能センサー「LiDAR」で死角や障害物などの空間情報を取得し、自動生成した「デジタルツイン」を生かして自動走行型のロボットが障害物を避けながら自律的に目的地へ移動する。
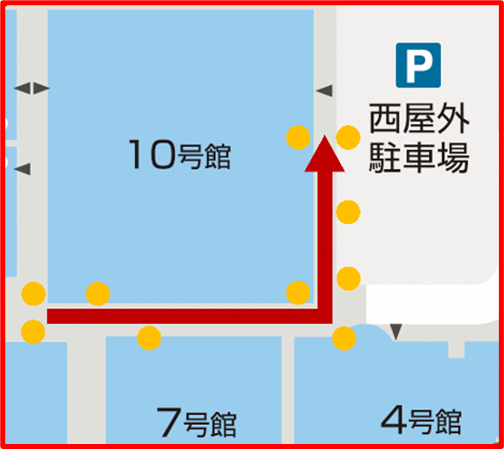
自動走行型のロボットが、10号館南面「ツドイStreet」のフードトラック利用者が購入したテイクアウトフードを、図2で赤矢印で図示した経路を通って、利用者が待つ10号館西面のテラス席まで自動走行で運ぶ計画。

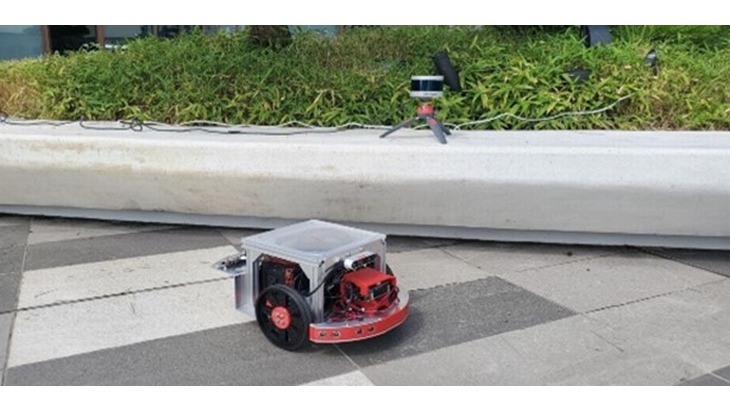
自律走行する運搬ロボットとセンサー(LiDAR)

赤矢印:ロボット走行場所/黄丸印:センサー(LiDAR)設置場所
(藤原秀行)※写真はいずれもKRP提供